作者:朵朵菊花向阳开
原文:https://zhuanlan.zhihu.com/p/2015470633765593982
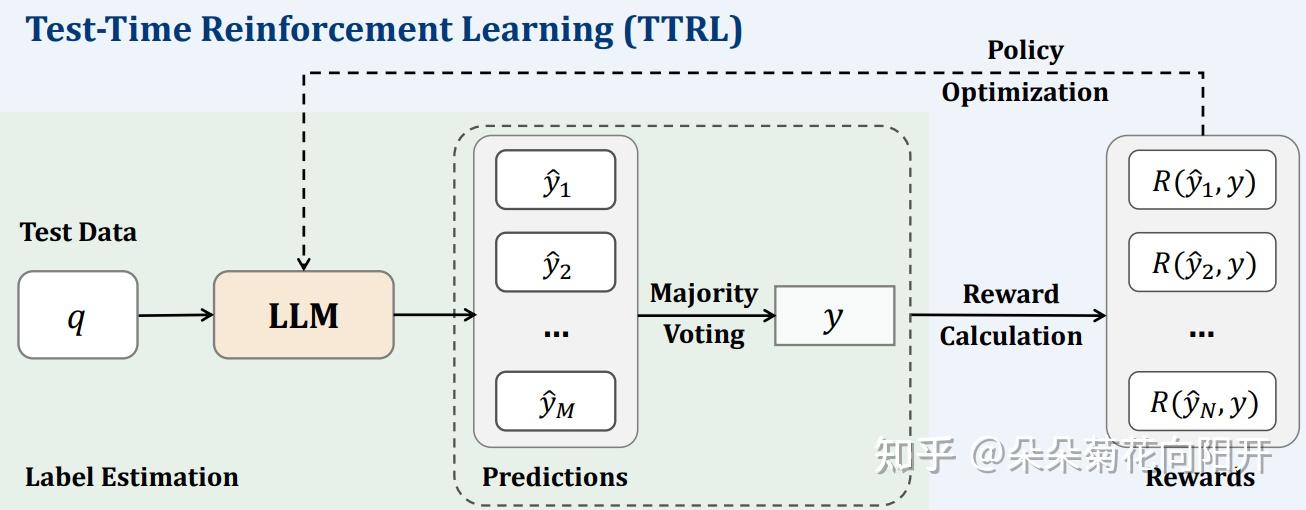
从TTRL开始,无监督RLVR(Unsupervised RLVR)应运而生,让模型在没有人工标注的情况下持续进化。这不仅是降本增效的需求,更是通往超级智能的必经之路。就像预训练用无标注数据training出了GPT,无监督RLVR能否延续这一奇迹?
首先还是将关于我们最近的无监督RLVR工作的链接放到最开头:
✨ ArXiv Paper Link: [How Far Can Unsupervised RLVR Scale LLM Training?
https://arxiv.org/pdf/2603.08660
🤗 HF Paper Link: https://huggingface.co/papers/2603.08660
𝕏 Thread: https://x.com/HBX_hbx/status/2031406636930338828
💻 GitHub: https://github.com/PRIME-RL/TTRL/tree/urlvr-dev
前言
25年几乎一直都在关注大模型的强化学习,比较聚焦在可扩展的强化学习上。可扩展一方面是有监督的场景下能不能一直训下去,reward 能不能一直涨下去,效率和稳定性怎么样。 去年年底,我们做了JustRL,发现简单的RL recipe也能比肩不少加了各种 tricks的工作,最后也很开心能被ICLR 2026 Blog Track接收。传送门:JustRL: 当我们用"最笨"的方法刷新 1.5B 推理模型SOTA
另一方面,在有监督场景下如果模型越来越强,那么有没有可能给无监督的奖励,让这个 scaling继续下去呢? 在4月份的时候看到一系列的无监督强化学习的工作,从TTRL、EMPO开始,到后面的比如Intuitor,甚至Spurious Reward这个工作利用一些 random/incorrect的 reward都能让模型在RL过程提升performance,当时掀起了广泛的讨论,大家开始思考LLM RL到底在干什么。
一派观点认为RL能真实提升推理模型能力边界,而另一派认为现在LLM的RL被基座模型能力锁死了,再多的算力也只是将pass@k迁移到 pass@1。在有监督场景尚且有这样的讨论,在无监督场景能work似乎也逃不过。但是无监督场景确实比较吸引人,不用人工标注就能提升,正好落在scaling RL的方向上。
后面无监督方面的工作越来越多,出现了各种各样的变种,比如根据logits变着花样算 "confidence" 然后作为reward,或者从 TTRL单个模型多数投票,到交叉两个模型多数投票(Co-Reward),甚至多个模型一起多数投票来集成(RLCCF),或者到Tree-based的多数投票(ETTRL)。
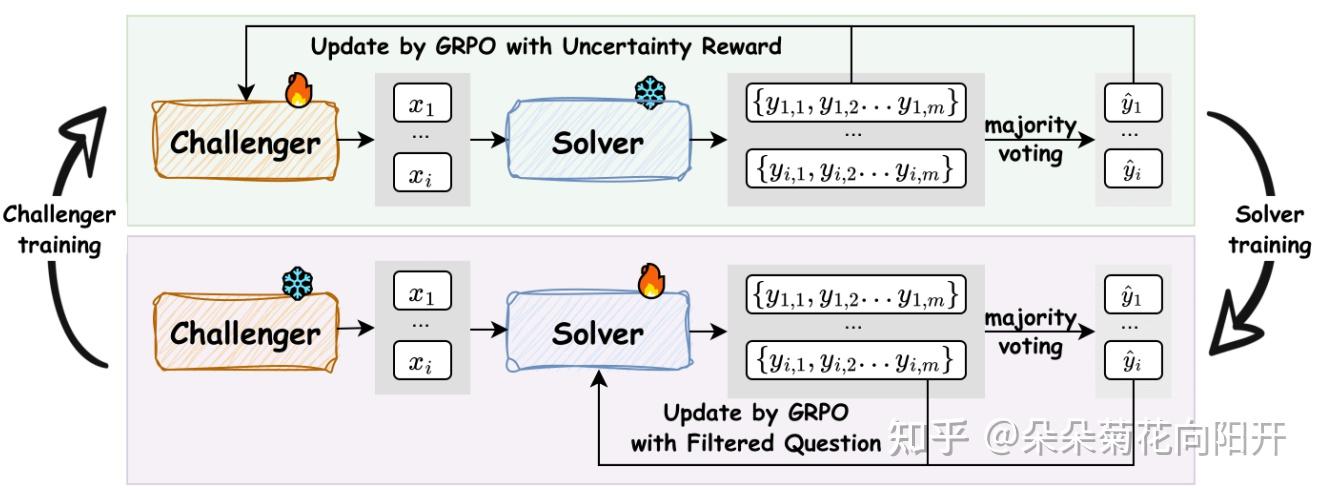
单个模型可能还不够,开始用起来self-play这一套,比如一个Proposer一个Solver,Solver的奖励就可以用无监督奖励,然后 Proposer就只用提出适合Solver解题的奖励即可,这上面的设计就可以有很多种。
比如SeRL就不对Proposer奖励了,直接根据难度filter提出的问题;R-Zero给 Proposer提供的奖励是用Solver的不确定性算的;SQLM也是根据题目难度来给Proposer奖励,CPMobius就根据Solver的前后 delta accuracy来给奖励。
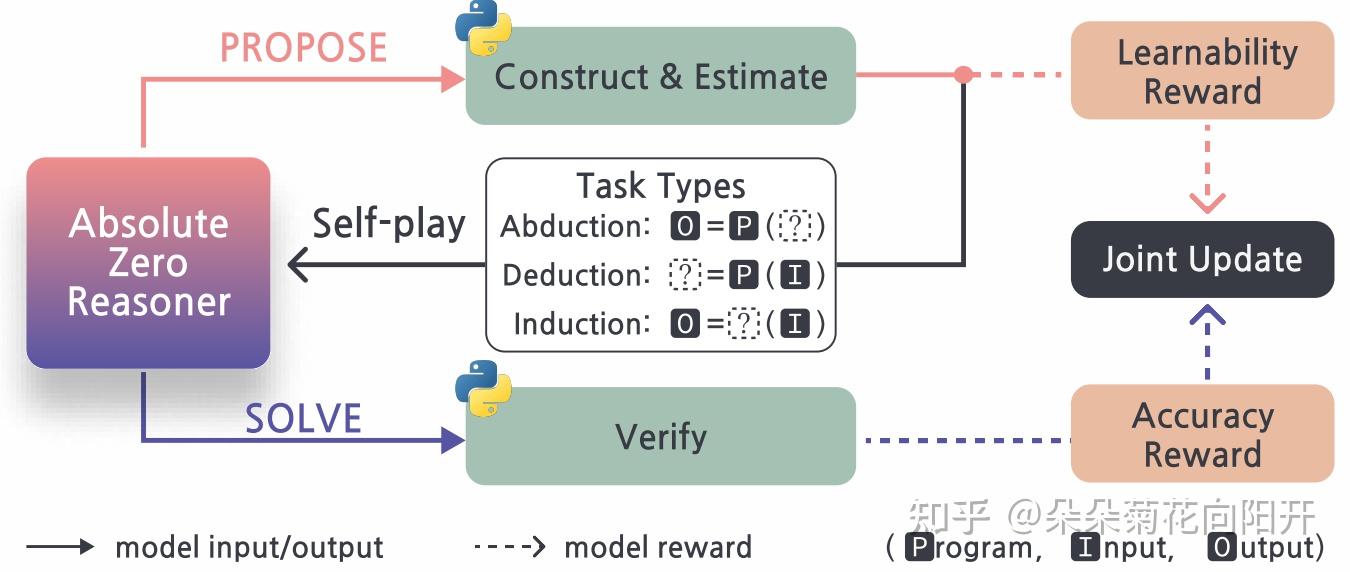
在无监督方面工作的浪潮中,有一些工作也涌现出来,走的是不一样的路子。比如Absolute-Zero,虽然奖励也无需人工标注,但是这个奖励是通过让代码解释器执行出来的,某种程度也是一种 ground truth label。
再比如RPT这个工作,大家可能对其封面图里面的LeCun's Cake还有印象,一个大大的樱桃里面却是蛋糕。RPT通过在无监督语料上构建自监督任务来近乎无限地利用已有语料。
无监督RLVR方法分类
好了该切入正题了,我们想做的是什么?当时是25年5月份,看到这些工作,本来是想做一个 survey,好好把这些工作整理下,做一个比如A survey of Unsupervised RLVR。但是在复现这些工作的过程中,发现了一些很有意思的结论,有比survey本身更值得展现的一些东西。
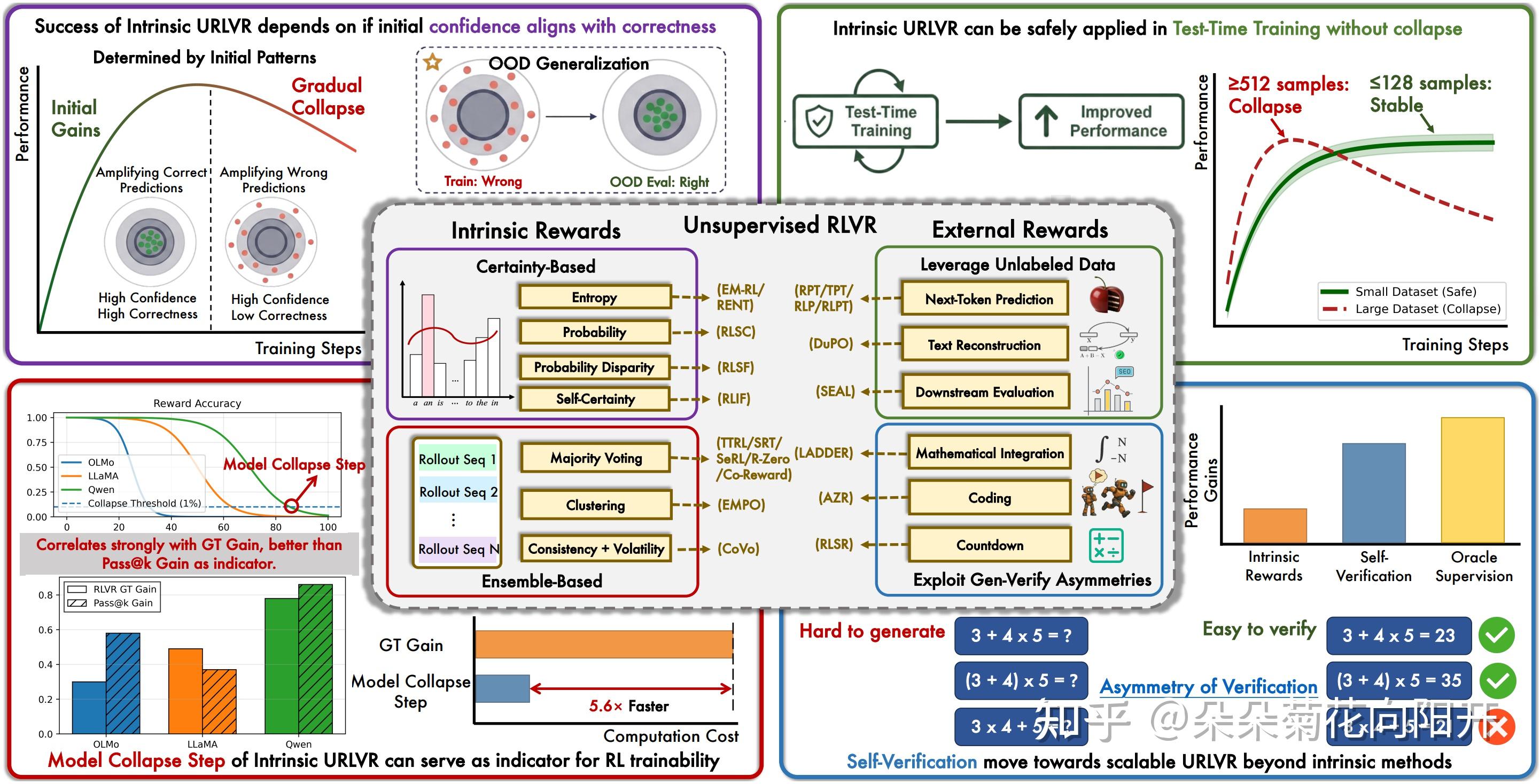
我们先简单给现有无监督RLVR方法分了个类,按照奖励的来源分为内在奖励和外部奖励:
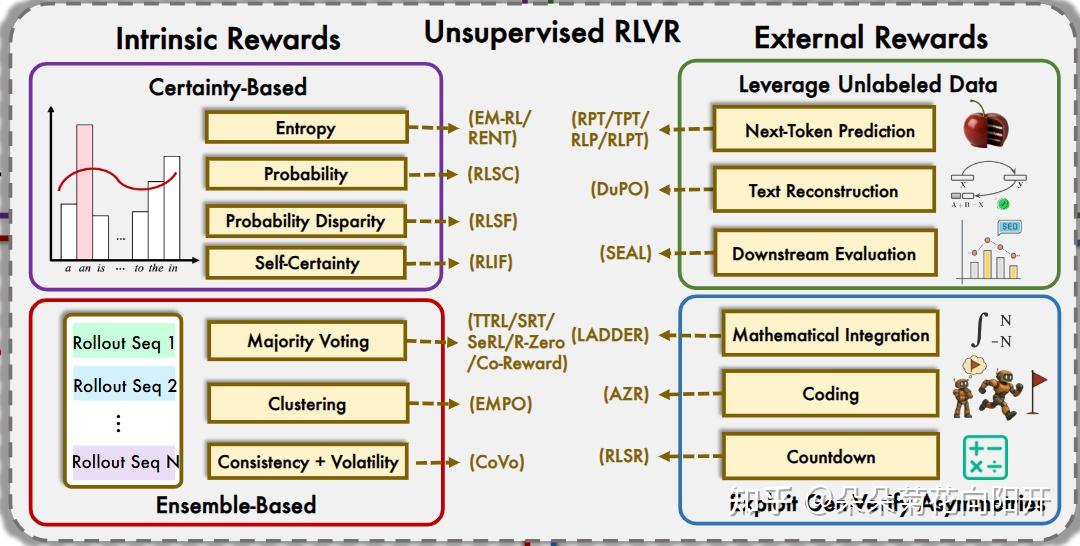
内在奖励方法:繁荣表象下的深层问题
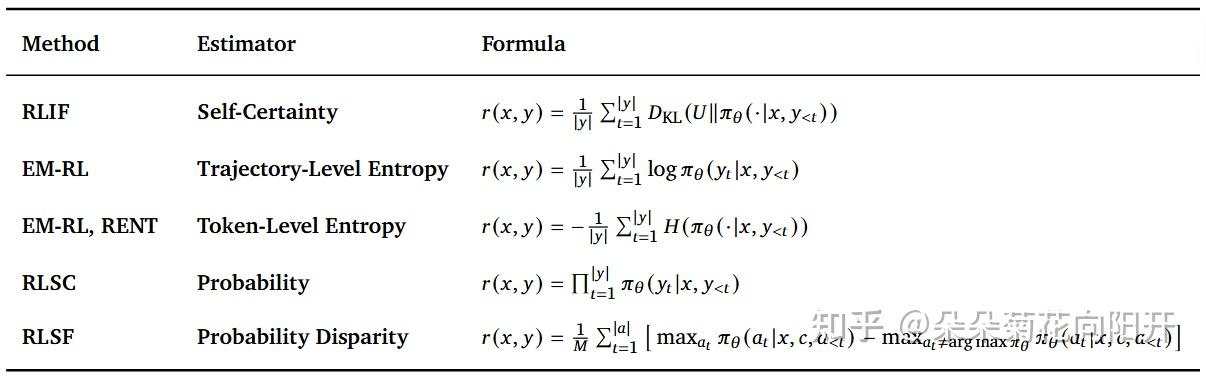
对于内在奖励方法,现有工作展现出这些方法一定的效果。从多数投票到基于模型自信度/熵的变体,它们利用模型内在信号来构造proxy reward,训练前期性能飙升,甚至一度超过有监督方法。
我们将这些方法根据奖励的来源归纳为两类:一类基于certainty,直接取模型在推理轨迹上的置信度指标作为奖励;另一类基于ensemble,用多次rollout后的集成结果(如多数投票)来锚定正确。
虽然奖励的来源是免费的,但是代价却是昂贵的。 在早期训练性能飙升之后,继续训练会触发典型的reward hacking:
- proxy reward还在持续上涨,真实 performance 却在崩溃
- 模型越来越自信,但答案却越来越离谱
- 不同内在奖励方法在不同模型上表现天差地别
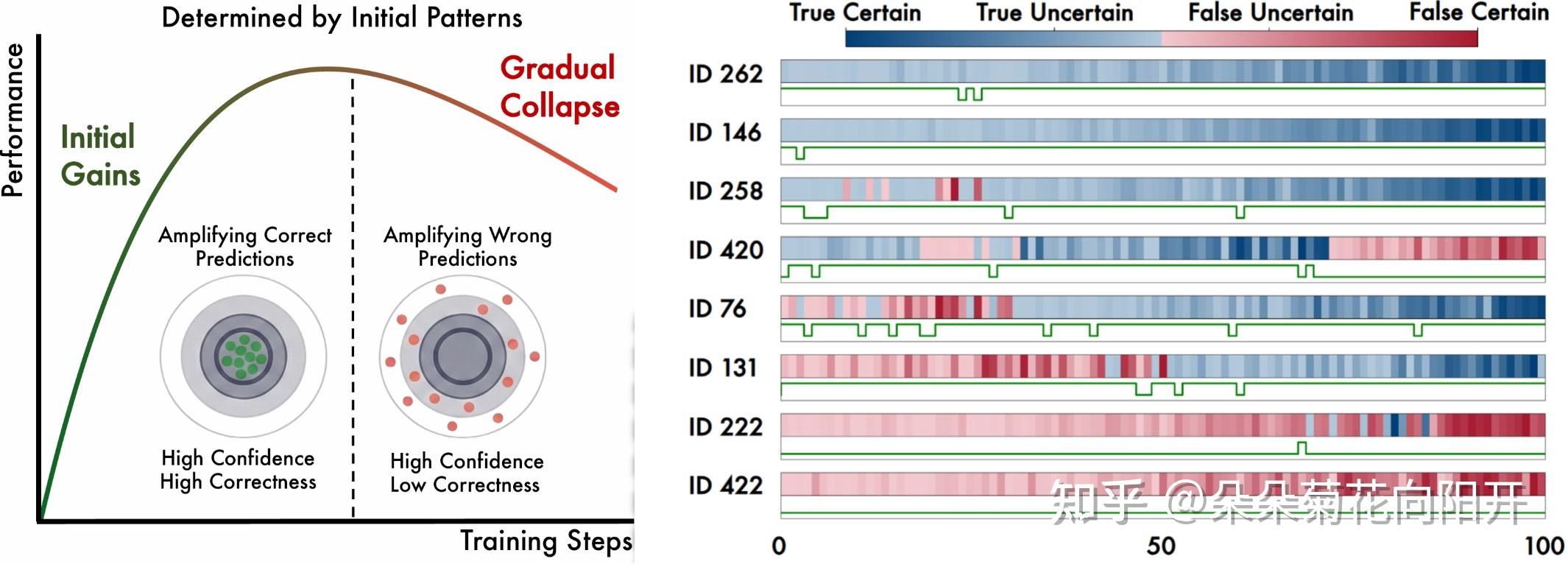
我们发现,几乎所有基于模型自身信号的内在奖励方法,无论多数投票、熵奖励还是其他变体,都遵循着一条相似的轨迹:训练初期性能快速攀升,但到达某个临界点后,开始不可逆地滑落。这不是某个方法的缺陷,而是机制的宿命:它们本质上都在锐化模型已有的偏好,像一个回声室,让模型不断重复自己最初相信的东西。如果初始自信恰好正确,效果惊人;如果错配,坍塌只是时间问题。
我们做了什么:拆开黑箱,划清边界
我们不想只是“提出新方法刷个点”,我们想回答那个没人说清的问题:
无监督RLVR的 scaling上限在哪里?如果有上限,边界在哪里?
为此,我们做了五件事:
- 统一理论框架: 把看似五花八门的内在奖励方法归到同一个机制下,揭示它们殊途同归的本质——锐化模型初始分布,并给出理论收敛边界。
- 大规模实证: 11个模型×5种内在奖励方法×超参数扫描,用数据说话,验证了“先升后降”不是偶然,而是普适规律。
- 画出安全区: 不是所有场景都会崩溃。我们发现,在小规模test-time training中,内在奖励可以安全使用,即使初始全错也能稳定进化。
- 化陷阱为路标: rise and fall不只是风险,它本身就是信息。我们用它提炼出模型先验指示器,无需跑完整条RL曲线,就能预判一个基模是否适合强化学习。
- 探路替代方案: 既然内在奖励有天花板,我们就看向外部。初步探索基于生成-验证不对称的外部奖励方法,看它能否真正突破内在奖励的scaling极限。
四个关键发现
🔍 发现一:成败取决于 “confidence-correctness” 对齐程度
我们建立了内在奖励方法的统一理论,揭示所有内在奖励方法的本质:锐化分布,即放大模型已有偏好,而非创造新知识。 这个机制有个特性:
- 如果模型初始倾向正确→锐化有效,性能提升
- 如果模型初始倾向错误→锐化有害,加速崩溃
我们定义模型初始倾向(或者称为模型先验)为confidence-correctness对齐程度,即当我们仅提升模型的自一致性时,有多大可能就能直接做对更多的题目。换句话说,一个先验比较强的模型,本身已经掌握了解决问题的大部分知识,只是不够自信以至于说不出正确的答案。
我们测试了11个模型、5种方法、4个常用的超参数,结论似乎是残酷的:崩溃不可避免,只是时间问题。即使最稳定的配置也撑不过几个 epoch。这说明可能不是工程问题,是数学必然。
✅ 发现二:小场景里反而安全
Rise and fall是宿命,但宿命有它的适用范围。
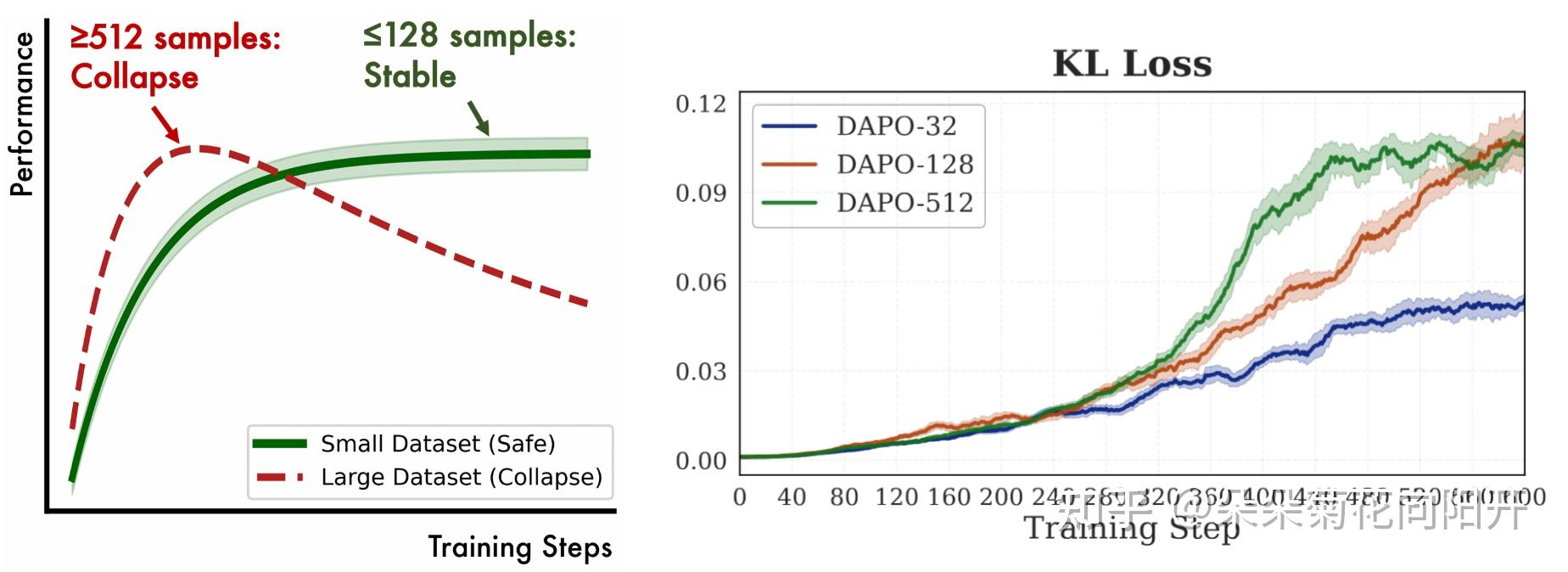
当训练数据足够少,比如Test-Time Training这种特定领域场景,内在奖励方法反而展现出难得的稳定。原因很朴素:只在少量样本上优化自信度,模型跑不了多远就到头了。即便它在这些样本上变得“超级自信”,也难以引发全局的策略偏移,OOD任务上的准确率依然稳稳守住。
更有意思的是一个极端实验:我们刻意选了 32条模型全错的样本作为训练集。也就是说,内在奖励给出的proxy reward从一开始就是错的。结果呢?OOD测试集上的性能依然在稳定提升。
这说明,内在奖励不是在教模型“什么是对的”,而是在教它“更相信自己”。即使信错了,这种自我强化也被牢牢锁在局部,翻不起大浪。
🎯 发现三:判断模型适不适合做RL
Rise and fall不只是风险,它本身就是信息。
既然内在奖励的成败取决于模型初始的“置信度-正确性”对齐程度,那能不能用这个对齐度,提前判断一个基模是否适合做RL?毕竟,跑一次大规模RL的成本太高了,而学界一直缺一个轻量级的预判指标。
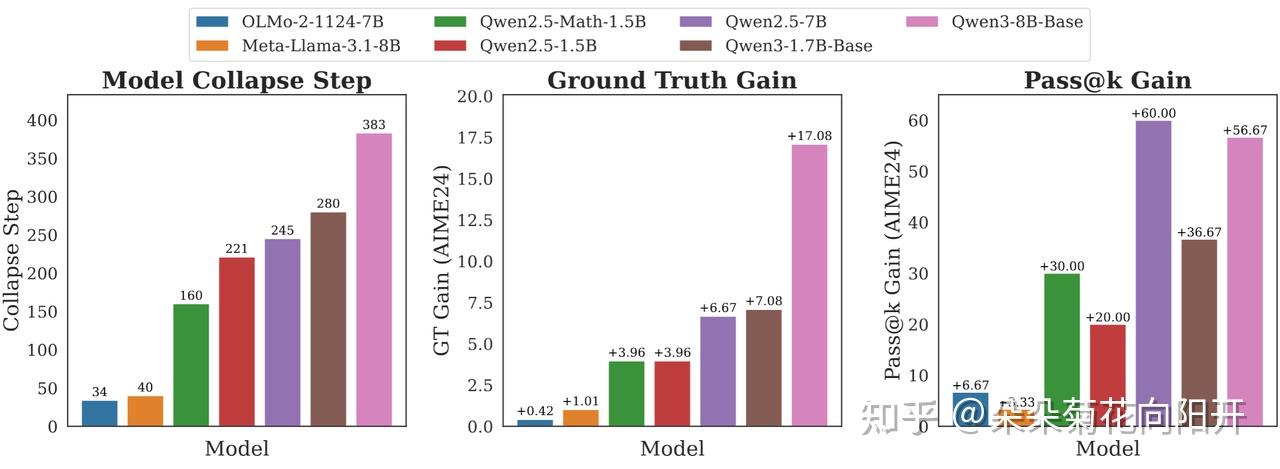
我们找到了一把尺子:模型坍塌步数(Model Collapse Step),去测量一个模型在内在奖励训练下,能撑多少步才完全崩溃。 逻辑很简单,如果崩溃越晚,说明模型的初始先验越好,它本身就掌握更多正确知识,只是不够自信;而这种先验,恰恰是标准有监督RL能够放大的东西。换句话说,内在奖励的崩溃点,就是模型“RL可训练性”的天然指示器。
结果也印证了这一点。Qwen这种公认“适合 RL”的模型系列,在内在奖励下撑得更久。更有意思的是,这个指标无需任何ground truth标注,预测准确率超过传统的pass@k。
把失败变成路标,把昂贵的试错变成轻量级的预判。
🚀 发现四:外部奖励才是scalable的方向
如果内在奖励注定有天花板,那路在何方?
问题的根源在于奖励的来源。内在奖励方法用模型自己的置信度来训练模型自己,这就像一个闭环回声室,奖励信号永远受限于模型已知的东西。你无法用它教会模型真正不知道的知识。
但无监督RLVR不止于此。我们把外部奖励方法归纳为两类:
- 利用无标注数据: 从海量语料中挖掘奖励信号。数据越多,奖励信号越丰富,不会因为模型变强而枯竭。
- 利用生成-验证不对称性: 让模型自己生成答案,再用外部工具(编译器、证明助手、模拟器)验证并提供环境反馈。这些验证器不会因为模型变强而失效,它们的判断永远客观。
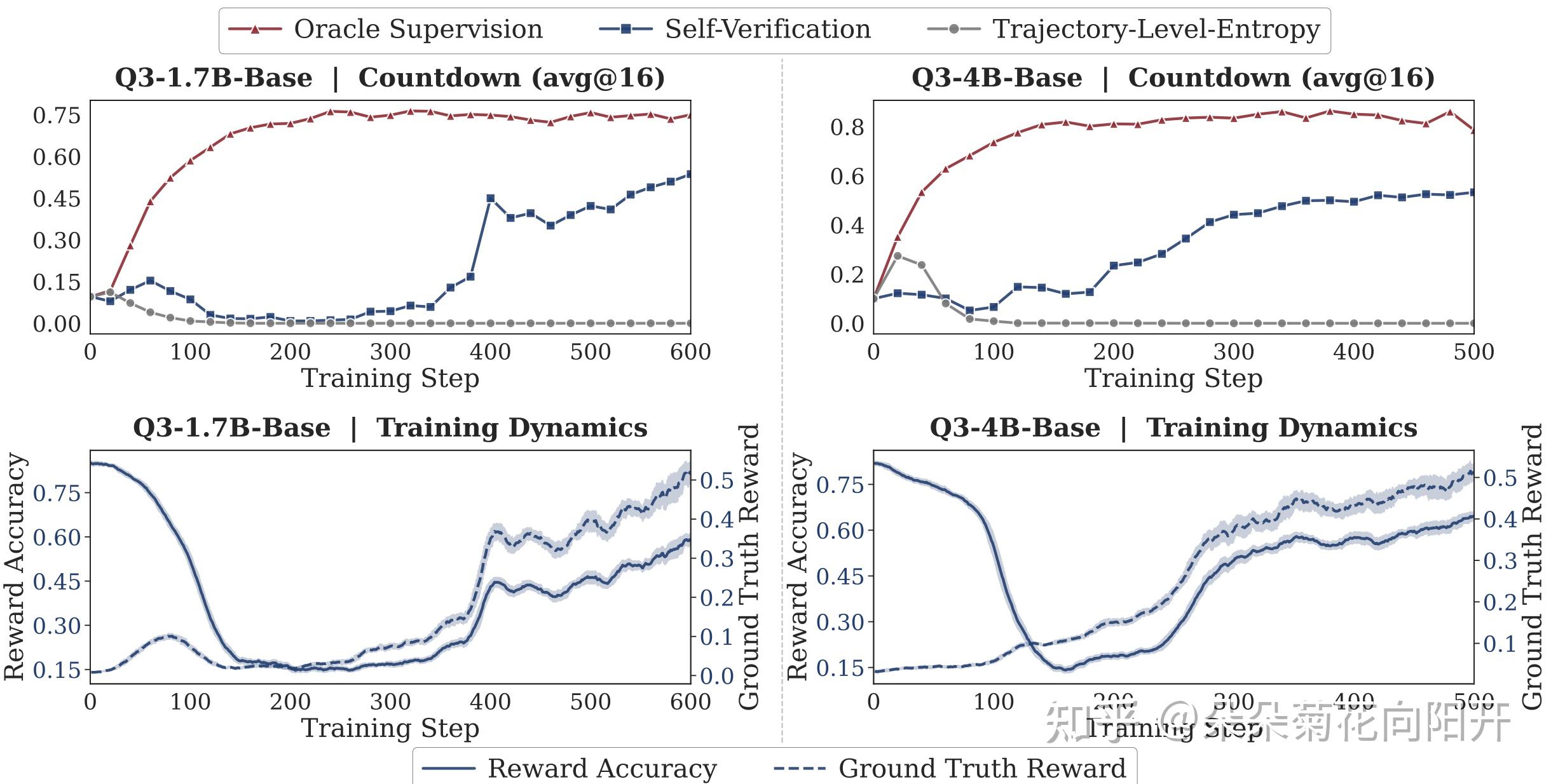
我们初步测试了自验证方法,结果展现出一条截然不同的曲线:持续改进,没有崩溃。原因很朴素,奖励不来自“模型有多自信”,而来自“答案能否通过客观验证”。想出解法可能很难,但检查对错往往简单;这种不对称性,把模型的进化锚定在真实世界的铁律上,而不是自己的回声里。
内在奖励追问“你相信自己吗”,外部奖励追问“这是真的吗”。通往scalable的无监督强化学习,答案或许就在后者。
写在最后:边界之外
我们花了许多篇幅去描绘无监督强化学习的边界。但这张地图的价值,从来不在于告诉你“此路不通”,而在于回答:在什么条件下,哪条路通。
一个系统能否通过审视自己而变得更好,取决于它最初的判断有多准确。内在奖励方法失败的原因,恰恰是它们成功的原因,都是同一个机制:自我强化。区别只在于,被强化的是真理还是偏见。
当我们认清内在奖励的宿命,才真正看清外部奖励的星辰大海。通往scalable的无监督强化学习,需要的不是盲目相信模型可以自我进化,而是知道什么时候该让它倾听自己的回声,什么时候该把它推向真实世界的验证。
内在与外部不是对立,而是工具箱里的不同工具。认清边界,不是为了止步,而是为了在边界内自由创造,在边界外寻找新的可能。