
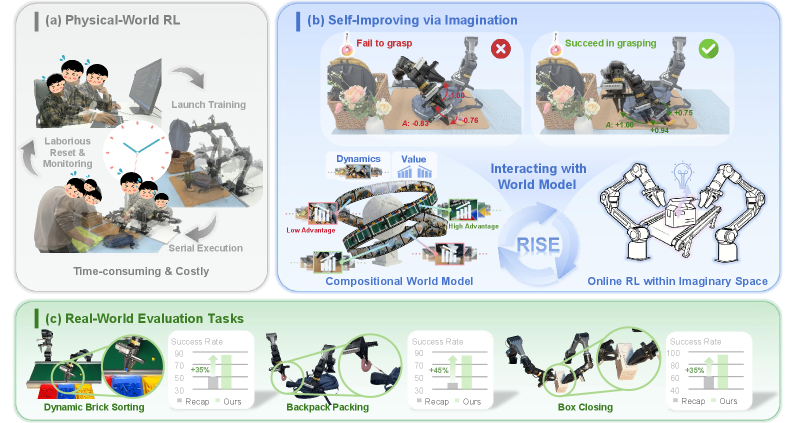
在具身智能领域,物理世界中的强化学习(RL)长期受限于高昂的硬件成本、繁琐的环境重置需求以及试错过程带来的安全风险 。
为此,OpenDriveLab提出了RISE,一种通过“想象”来实现机器人策略自主进化的可扩展强化学习框架 。
论文:RISE: Self-Improving Robot Policy with Compositional World Model
链接:https://arxiv.org/abs/2602.11075
项目主页:https://opendrivelab.com/kai0-rl/
RISE的核心突破在于构建了一个组合式世界模型(Compositional World Model)。该架构巧妙地将环境模拟解耦为两个独立的模块:
一个是负责根据动作精准预测未来多视角状态的动力学模型
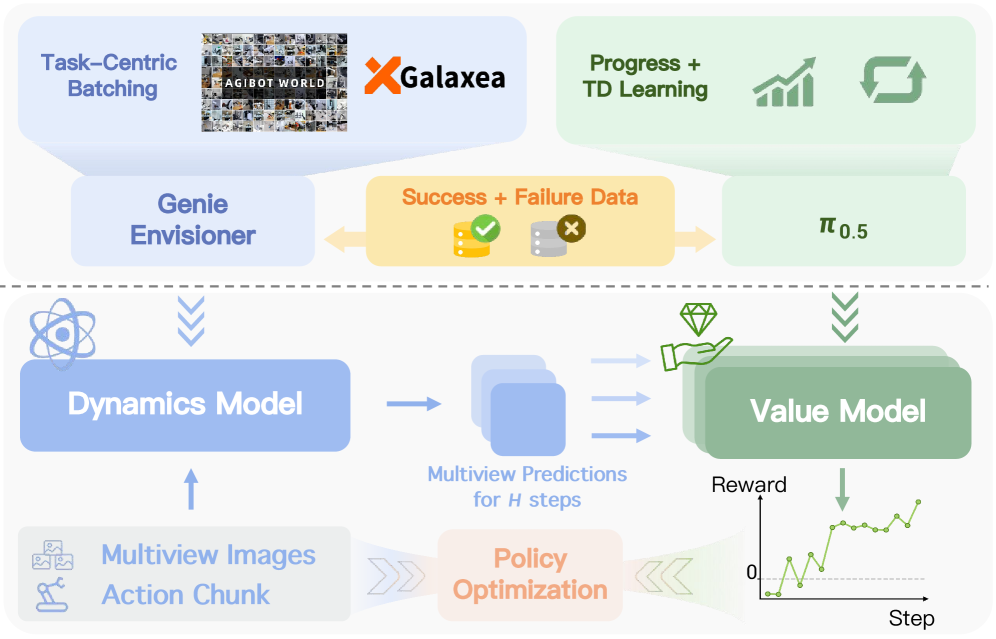
另一个则是负责评估“想象”结果并提供有效的价值估计。
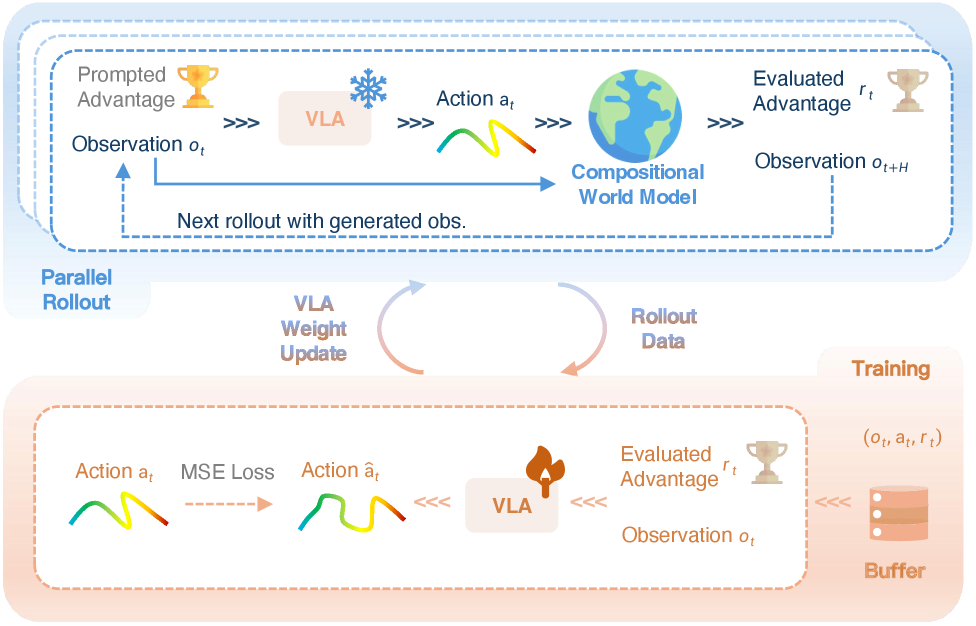
借此,机器人无需在真实的物理环境中进行耗时、昂贵的交互,而是直接在世界模型构建的想象空间中闭环更新策略。RISE打破了物理瓶颈,为具身基础模型的高效自我提升开辟了新范式。
3月28日(周六)上午10点,青稞Talk 第115期,CUHK MMLab 博士生杨佳智,将直播分享《RISE: 组合式世界模型,在“想象”中实现机器人策略的自主进化》。
分享嘉宾
杨佳智,CUHK MMLab PhD 二年级在读。以共同第一作者身份发表 UniAD, 获得2023年CVPR的最佳论文奖。 关于世界模型的两项研究获得CVPR 2024 spotlight (前2.8%) 和 NeurIPS 2025 highlight (前 3.2%)。近期推出的RISE架构,是首个在机器人复杂操作任务中,利用世界模型进行强化学习以提升策略表现的研究。个人谷歌学术被引用量超过2400。个人主导项目的Github star数超过6000。
主题提纲
RISE: 组合式世界模型,在“想象”中实现机器人策略的自主进化
1、从 VLA 到世界模型,真机 RL 的瓶颈
2、具身智能的范式跃迁:从“经验驱动”到“想象驱动”
3、RISE 的核心架构:组合式世界模型与想象驱动的自进化
4、实验验证与未来技术的探讨
5、AMA (Ask Me Anything)
直播时间
3月28日(周六)10:00 - 11:00