
本工作于字节跳动完成。首次发布于2025年9月17日。
原文:https://richardli.xyz/rl-collapse
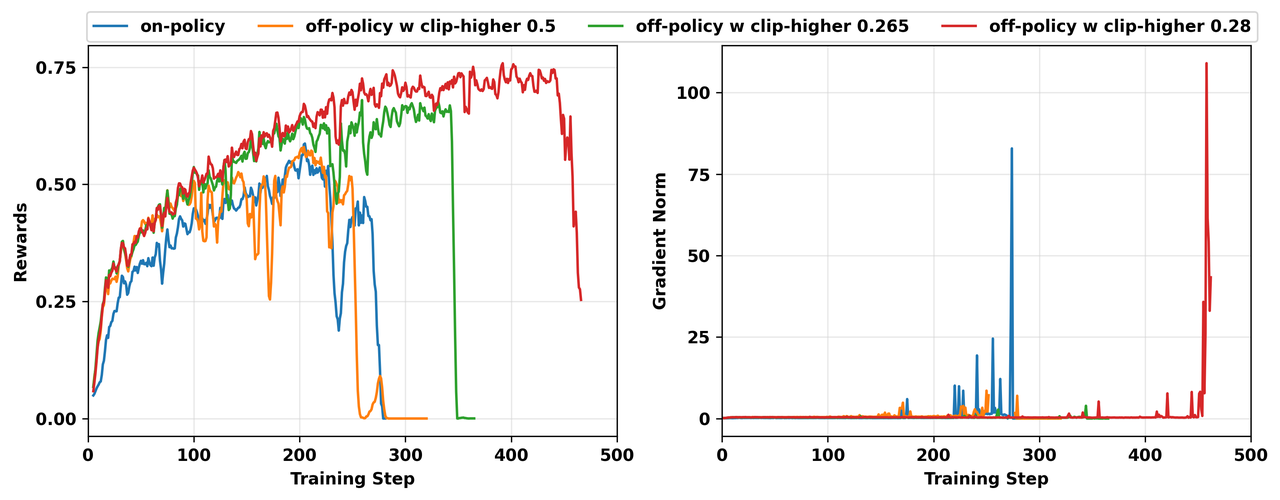
图1. 我们在Qwen3-14B-Base上进行的四次失败的GRPO TIR实验的奖励(左)和gradient norm(右)。所有实验在每个训练步骤采样 1024条轨迹(64个提示词 × 16个回复),学习率为 1e-6。在on-policy和off-policy实验中,ppo_mini_batch_size分别设置为 1024和 256。
最新动态
[12月2日] #DeepSeek-V3.2 采用了我们的geometric sequence masking来处理训练-推理不匹配和通用off-policy训练不稳定性!
[12月1日] 我们的工作被Qwen团队的 Stabilizing Reinforcement Learning with LLMs: Formulation and Practices 引用。
[11月12日] 通用off-policy问题的Rollout校正已合并至VeRL:[使用文档][更多细节](Yingru Li)
[11月10日] 我们的工作在 vLLM博客 中被讨论,他们实现了"比特级一致的on-policy RL"。
[10月31日] VeRL全异步模块已在 [PR] 中集成了我们的工作。
[10月20日] Slime已在 [PR] 中集成了我们的工作。(SGLang RL:Chenyang Zhao, Jiajun Li)
[10月16日] 我们的工作被 SWE-grep(Cognition)引用,该工作同样使用sequence级别Masked Importance Sampling(MIS)来解决训练-推理不匹配问题。
[10月15日] 通过geometric-level masking解决了一个Megatron训练崩溃问题。
https://github.com/volcengine/verl/issues/3597
[10月13日] VeRL已在 [VeRL 0.6.0][PR] 中集成了我们的工作,包括新引入的sequence masking/rejection with geometric mean of importance weight(Geo-MIS/Geo-RS)。(Yingru Li)
要点摘要(TL;DR):
对更快推理的追求已造成显著的"训练-推理不匹配",这可能导致大语言模型的RL训练失败。我们的研究揭示了一个正反馈循环问题,在现代reasoning和agent RL中尤为突出:
1、 分布外上下文导致低概率采样: Agent工作流使模型暴露于外部输入和动态环境,导致模型频繁生成低概率token,这些token对于新颖的推理、工具调用和自适应响应至关重要。3.4 分布外工具响应放大不匹配
2、 低概率token加剧训练崩溃: 这些token是训练-推理不匹配最严重的位置,导致异常大的梯度,引发隐性退化和训练失败。3.3 关键发现:低概率Token陷阱
3、 硬件差异使问题复杂化: 不同的GPU架构以不同方式加剧不匹配,这意味着相同的agent训练配置可能在一台机器上成功,而在另一台机器上失败。3.5 环境因素:硬件的关键作用
4、 sequence级别校正是有原理依据的解决方案: sequence级别校正是理论上成立的解决方案。它通过考虑完整的状态轨迹来校正有偏梯度,在不同硬件和复杂任务中恢复训练稳定性。4.2.1 原理性解决方案:分布校正
深入分析:
为了对这个问题进行严谨的理论分析,我们发布了一个新的三部分博客系列以提供深入分析:
[Part 1: 为什么Off-Policy会使得RL优化不稳定 — SGA分析框架]
已知(TRPO理论): Surrogate目标 L_\mu(\pi) 是RL目标 J(\pi) 的一阶Taylor近似;TRPO下界 J(\pi) \ge L_\mu(\pi) - C \cdot T^2 \cdot D_{TV}^{\max} 表明近似误差随 T^2 增长,要求trust region收缩为 \delta \propto 1/T^2。
我们的洞察: Token级别IS(PPO/GRPO)计算的是 \nabla L_\mu 而非 \nabla J——它校正了token分布但未校正状态分布不匹配(d_\mu \ne d_\pi),导致 O(T^2 \Delta_{\max}) 偏差。
我们通过SGA引理形式化了两种失效模式:偏差(由 D_{TV} 度量)和方差(由 \chi^2-divergence度量)——这两个度量不可互换。
[Part 2: SGA分析框架的应用——Token与Sequence级别校正]
我们的分析: Token级别IS(PPO/GRPO)具有源于surrogate一阶近似误差的 O(T^2 \Delta_{\max}) 偏差;Sequence级别IS无偏但方差呈指数级 O((1+\bar{\chi}^2_{\max})^T)。
我们的解决方案: Seq-TIS通过截断 \rho(y) \to \min(\rho(y), C) 实现可控的偏差-方差权衡。
核心结论: 此偏差是sequence级别问题,当其不可忽略时需要sequence级别的解决方案。
[Part 3: 基于Sequence Masking的Trust Region Optimization]
已知(TRPO理论): Trust region约束确保surrogate保持为有效近似。
我们的解决方案:
(1)Seq-MIS通过rejection实施Hard Trust Region \mathbb{I}(\rho \le C) \cdot \rho \cdot f,完全排除OOD样本。
(2)Geo-RS使用几何平均 \rho_{\text{geo}}=\rho^{1/T} 实现长度不变的Per-Token Trust Region——这是LLM场景下TRPO hard trust region的实际实现,避免了对长序列的系统性拒绝。
1. 突然崩溃之谜
在大语言模型RL(LLM-RL)快速发展的领域中,突然训练崩溃的现象日益凸显。无论是复杂的reasoning RL还是多轮agent RL,许多人都观察到训练过程在经历一段稳定学习后突然崩溃。
我们最近在对Qwen3模型进行多轮tool-integrated reasoning(TIR)的agent RL实验时遇到了这一问题。这发生在我们L20 GPU集群上GRPO算法的on-policy和off-policy变体中。
图1展示了我们在Qwen3-14B-Base上四次崩溃实验的奖励和梯度范数动态。随着训练的进行,梯度范数突然急剧增大,导致模型崩溃。我们最初的调查集中在常见的原因上:
- 我们检查了代码,确认我们的agent循环遵循token-in-token-out(TITO)的过程。
- 我们调整了Adam优化器中的超参数
beta1和beta2。 - 我们还对优势进行了批量归一化以平衡更新。
- ...
然而,这些标准修复方法都无效。由于即使是更简单的on-policy实验也失败了,我们怀疑问题不在于RL算法本身,而在于训练栈的更基础层面。这促使我们调查现代LLM-RL中一个关键且日益普遍的挑战:高度优化的推理引擎与高保真训练框架之间不可避免的差异。
2. 根本性冲突:
推理与训练之间日益扩大的差距
Rollout速度是LLM-RL的核心瓶颈。为了实现所需的大规模吞吐量,现代推理引擎(如vLLM、SGLang、TensorRT-LLM)采用激进的优化策略,如投机解码、低精度计算(INT8/FP8)和专用的批次变体CUDA kernel。在保持采样保真度的同时,现代推理引擎的首要目标是最大化吞吐量,通常以每秒token数来衡量。
相反,训练框架(如FSDP、DeepSpeed、Megatron-LM)必须达到不同的平衡,优先考虑梯度计算的数值稳定性和精度,通常对主权重和优化器状态使用更高精度的格式如FP32。优化优先级和约束上的这种差异造成了不可避免的训练-推理不匹配。 对更快rollout的追求正在使这一差异扩大。
虽然有人可能提议强制执行相同的计算(例如使用"batch-invariant kernel"),但这些解决方案会带来严重的性能损失,与使用高速推理引擎的初衷相悖。这种速度与一致性的权衡是问题的核心,使其成为一个持久的挑战,而非简单的工程修复所能解决。
在我们的技术栈中,这种不匹配具体表现在vLLM推理采样器和FSDP训练器之间。实际的参数更新是:
而理论上的参数更新应该是:
其中 x 是从分布 \mathcal{D} 中采样的提示词,y 是回复,R 是奖励函数,\theta 是LLM的参数,\textcolor{red}{\pi^\text{infer}_\theta} 和 \textcolor{blue}{\pi^\text{train}_\theta} 分别是vLLM引擎和FSDP引擎中实现的策略。为了调查这个问题,我们首先需要一种方法来度量它。
3. 训练崩溃剖析
3.0 实验设置
除非另有说明,第3节和第4节中呈现的实验都是在TIR设置下的 VeRL 框架上进行的,使用vLLM v1采样器(AsyncvLLMServer)、Qwen3-14B-Base模型和GRPO算法,全部在L20 GPU集群上运行。
3.1 度量不匹配:train_infer_kl指标
度量训练-推理不匹配的一个直接指标是train_infer_kl:
其中 d_\pi 是策略 \pi 的状态占用度量(state occupancy),s 是上下文前缀(状态),a 是token(动作)。注意我们的实验涉及工具调用,这意味着回复 y 可能包含工具响应。因此,我们的 train_infer_kl指标仅考虑模型自身生成的token。
由于我们的实验使用vLLM作为推理引擎,在后续的实验图表中我们将此指标记为 vllm-kl。以下代码提供了在 VeRL 中使用K3估计器计算该指标的实现,假设推理引擎的token概率已经可以获取:
vllm-kl的K3估计器代码块
rollout_log_probs = batch.batch["rollout_log_probs"] # pi_infer
actor_old_log_probs = batch.batch["old_log_probs"] # pi_train
response_mask = batch.batch["response_mask"]
log_ratio = actor_old_log_probs - rollout_log_probs
vllm_k3_kl_matrix = torch.exp(log_ratio) - log_ratio - 1
vllm_k3_kl = masked_mean(vllm_k3_kl_matrix,response_mask)
3.2 警告信号:相关的不稳定性
我们的第一个线索是高 vllm-kl值并非孤立事件,而是与其他不稳定性指标高度相关。
3.2.1 FSDP熵和奖励的波动
在我们的许多实验中,我们观察到 vllm-kl的异常尖峰通常会同时触发FSDP策略 \textcolor{blue}{\pi^\text{train}_\theta} 的熵和奖励的异常波动。图2中的实验结果是一个直观的例子。
从图中可以看出,熵尖峰发生的位置几乎与 vllm-kl尖峰的位置完全对应。虽然在奖励中没有观察到同样显著的相关性,但可以看到在步骤250左右有一个很大的 vllm-kl尖峰,它触发了低质量批次的生成,并导致了该处明显的下降。
这意味着当不匹配较大时,vLLM策略 \textcolor{red}{\pi^\text{infer}_\theta} 和FSDP策略 \textcolor{blue}{\pi^\text{train}_\theta} 都进入了不稳定区域。
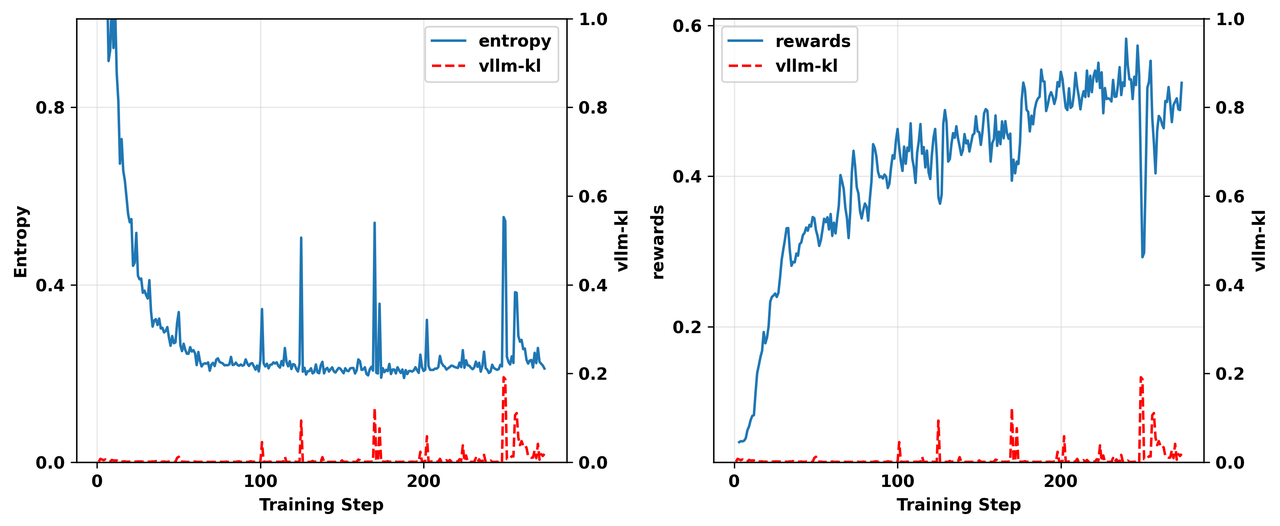
图2. 一个on-policy实验结果的对比展示,显示 熵(左)和 奖励(右)与 vllm-kl 值的对比,说明它们在训练阶段的相关性。
3.2.2 FSDP PPL和gradient norm上升导致策略崩溃
更关键的是,我们观察到 vllm-kl的尖峰同时触发了fsdp-ppl指标和梯度范数(gradient norm)的急剧增大。在我们的实验中,回复 y 的fsdp-ppl指标计算如下:
其中 \mathcal{T} _{\mathcal{M}}\left( y \right) 是回复 y 中模型自身生成的token的索引集。最终的fsdp-ppl指标是批次中所有回复的fsdp-ppl指标的平均值。图3展示了GRPO on-policy版本和off-policy版本的实验结果。
在两个实验中,vllm-kl的尖峰几乎精确地触发了fsdp-ppl和梯度范数的相应急剧增大。此外,可以观察到在训练奖励崩溃之前,vllm-kl指标有显著上升。
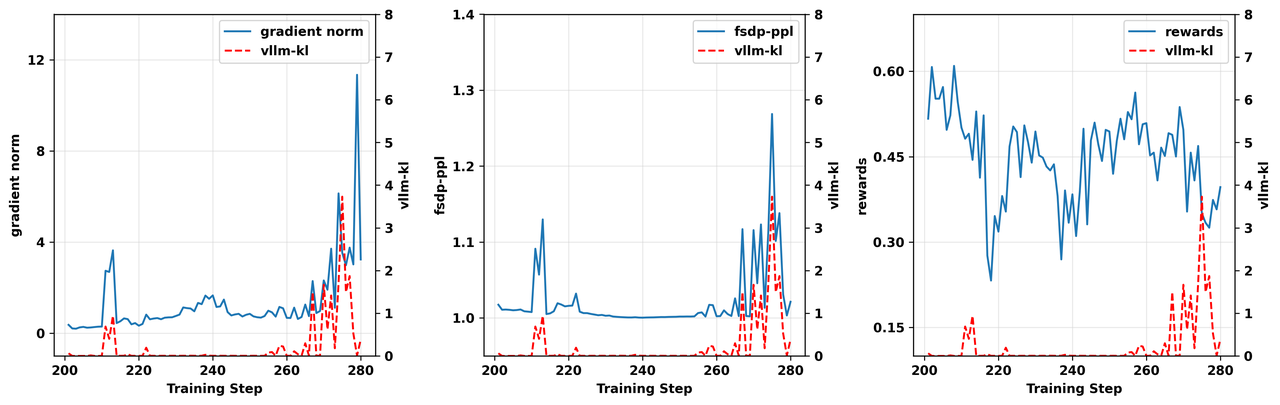
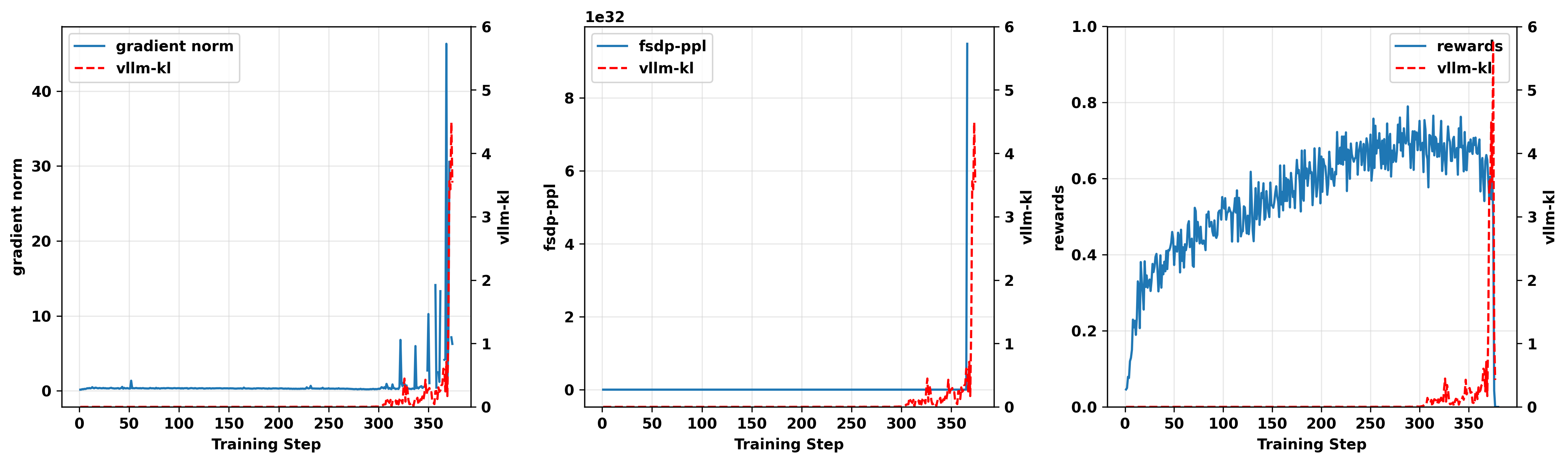
图3. 步骤200-280的on-policy实验结果(上)和clip-higher为0.28的off-policy实验结果(下),显示gradient norm*(左)、fsdp-ppl(中)和 奖励(右)与 vllm-kl 值的对比,说明它们在训练期间的相关性。*
在我们的实验中,模型自身生成的序列至少包含几百个token。因此,在训练后期阶段,ppl指标保持在1左右更为合理。然而,在训练-推理不匹配显著的批次中——即 vllm-kl显著较高的地方——观察到fsdp-ppl指标急剧增大。
这表明训练引擎为推理引擎策略采样的token分配了极低的概率,从而导致梯度爆炸。 这一观察帮助我们进一步定位了不匹配更可能发生的位置。事实上,正如我们稍后将看到的,当这些在训练引擎中概率极低的token被采样时,它们在推理引擎中的概率并没有那么低。
3.3 关键发现:低概率Token陷阱
不匹配并非均匀分布。
通过分析具有不同 vllm-kl水平的批次,我们发现了一个明显的规律:对于在vLLM推理引擎中概率较低的token,差异最为严重。
当token的推理概率接近零时,训练概率可能变得小几个数量级,导致PPL和梯度趋于无穷大。为确保结论具有足够的普遍性,我们从不同实验的不同训练步骤中选取了训练崩溃前采样的批次。
所有这些批次都表现出相对较高的 vllm-kl值,使我们能够在显著条件下研究不匹配模式。在以下三个 vllm-kl范围内收集了Rollout批次,每组五个批次(约500万token):
- 组1(低): 每个rollout批次的
vllm-kl不超过1e-3,批次使用H20 GPU采样。 - 组2(中): 每个rollout批次的
vllm-kl属于[1e-3, 2e-2],批次使用L20 GPU采样。 - 组3(高): 每个rollout批次的
vllm-kl属于[2e-2, 1e-1],批次使用L20 GPU采样。
下图4(a)(b)(c)展示了vLLM引擎的输出概率,即 \textcolor{red}{\pi^\text{infer}_\theta}(a|s) 与不匹配程度——由 \log\left(\textcolor{blue}{\pi^\text{train}_\theta}(a|s)\right)-\log\left(\textcolor{red}{\pi^\text{infer}_\theta}(a|s)\right) 度量——在不同 vllm-kl量级下的关系:
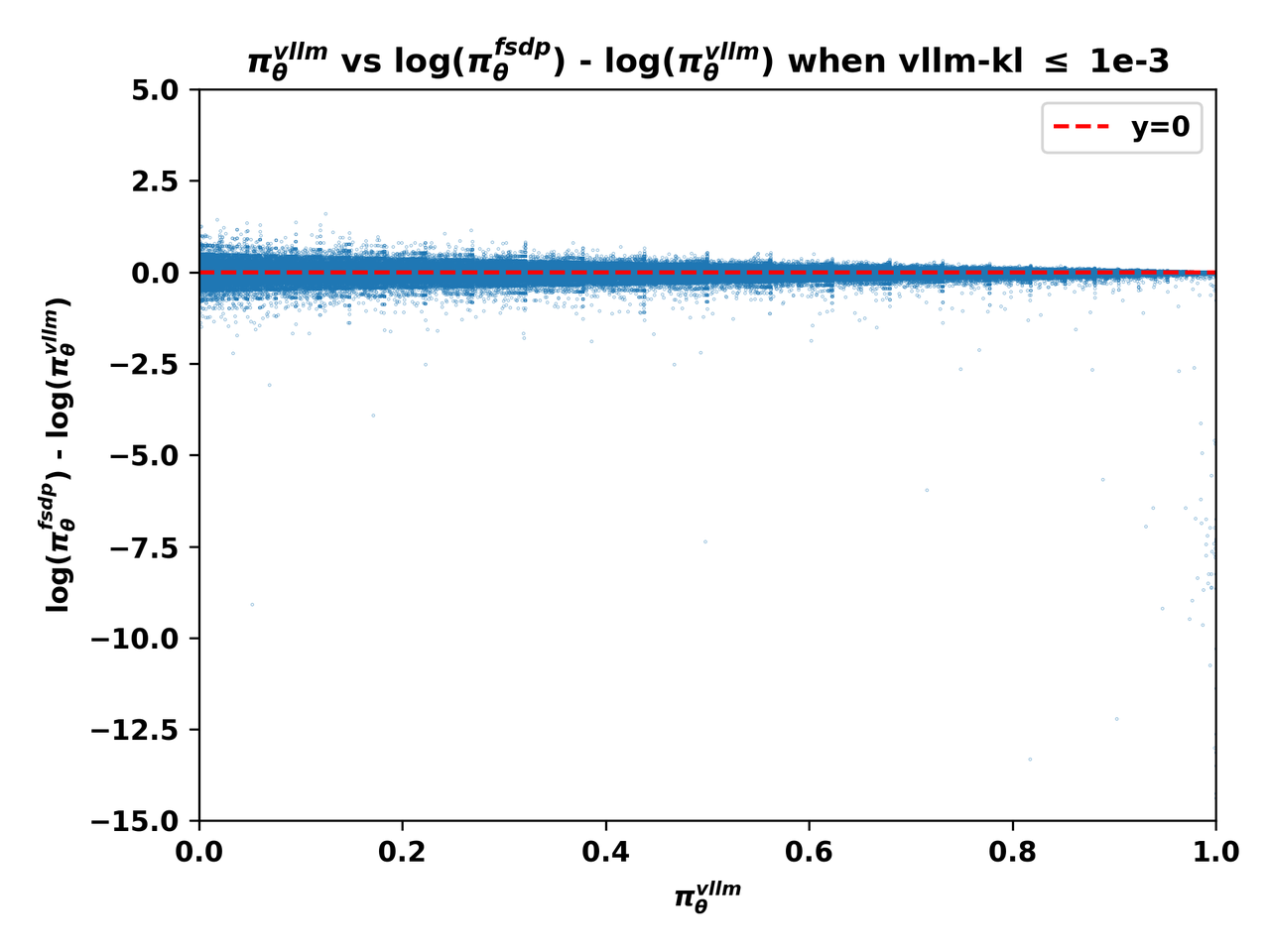
图4(a). 组1批次中token的 \textcolor{red}{\pi^\text{infer}_\theta} 与 \log\left(\textcolor{blue}{\pi^\text{train}_\theta}\right)-\log\left(\textcolor{red}{\pi^\text{infer}_\theta}\right) 关系图。
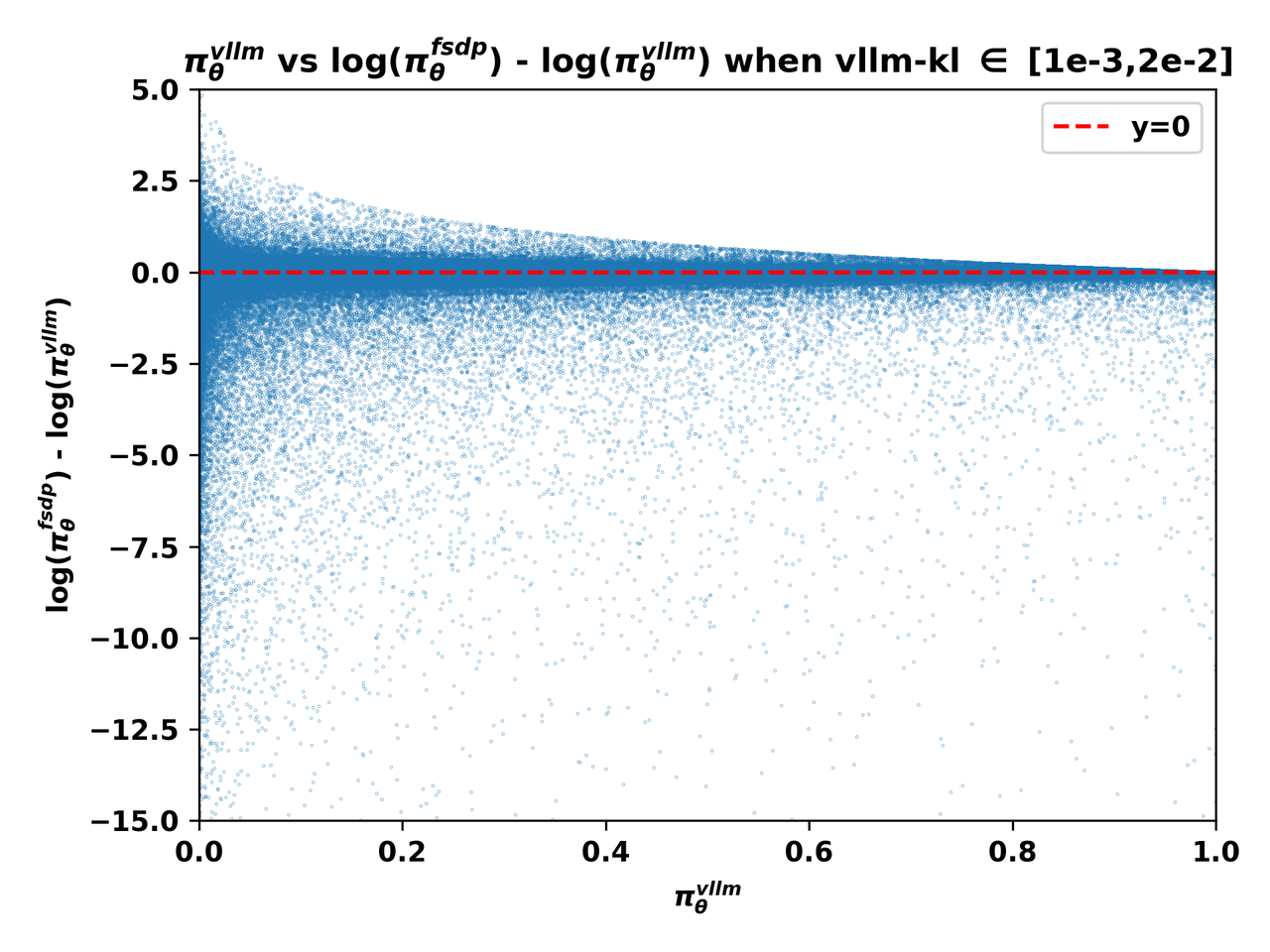
图4(b). 组2批次中token的 \textcolor{red}{\pi^\text{infer}_\theta} 与 \log\left(\textcolor{blue}{\pi^\text{train}_\theta}\right)-\log\left(\textcolor{red}{\pi^\text{infer}_\theta}\right) 关系图。
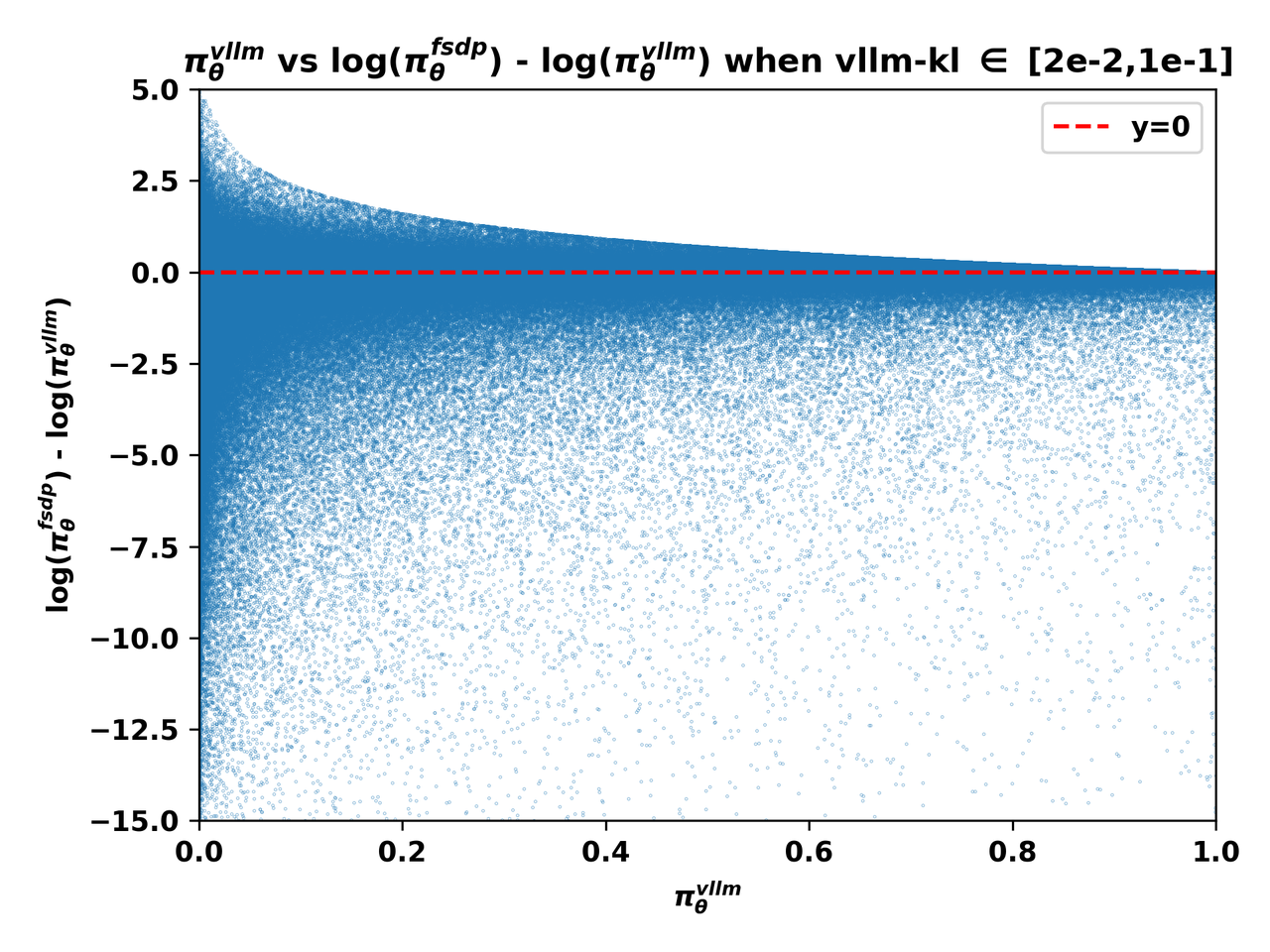
图4(c). 组3批次中token的 \textcolor{red}{\pi^\text{infer}_\theta} 与 \log\left(\textcolor{blue}{\pi^\text{train}_\theta}\right)-\log\left(\textcolor{red}{\pi^\text{infer}_\theta}\right) 关系图。
从上述三张图中,我们可以清楚地观察到:
1、 当vLLM概率 \textcolor{red}{\pi^\text{infer}_\theta} 接近零时,不匹配程度更加显著,\log\left(\textcolor{blue}{\pi^\text{train}_\theta}\right)-\log\left(\textcolor{red}{\pi^\text{infer}_\theta}\right) 的极端值更可能在这些条件下出现。
2、 在L20 GPU上收集的批次,即组2和组3中的批次,其训练-推理不匹配主要表现为FSDP概率 \textcolor{blue}{\pi^\text{train}_\theta} 显著小于vLLM概率 \textcolor{red}{\pi^\text{infer}_\theta}。
3.4 分布外工具响应放大不匹配
3.4.1 非首轮输出中不匹配更严重
第3节的发现解释了为什么这个问题在我们的多轮TIR实验中尤为严重,特别是在非首轮模型输出中。其过程如下:
1、 Agent接收工具响应,这通常是结构化文本(例如被 <python_output>和 </python_output>标签包裹的上下文),相比其预训练和SFT数据属于分布外数据。
2、 面对这种不熟悉的分布外上下文,agent的策略变得更加不确定,使其在后续轮次中更容易采样低概率token(这一现象在SimpleTIR中也有观察到)。
3、 正如我们刚刚确认的,这些低概率token正是严重不匹配发生的主要位置,为 fsdp-ppl和梯度的急剧增大创造了条件。
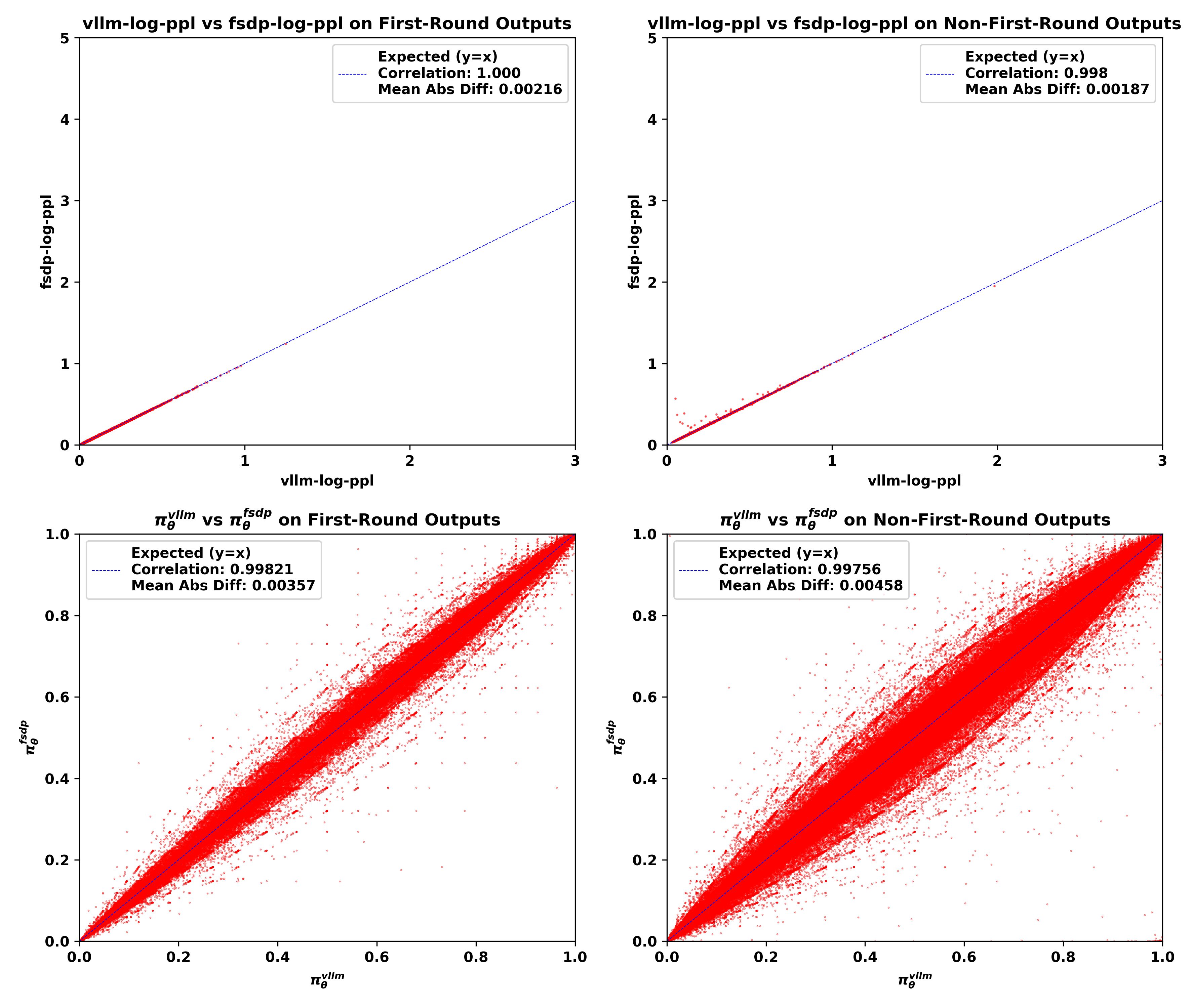
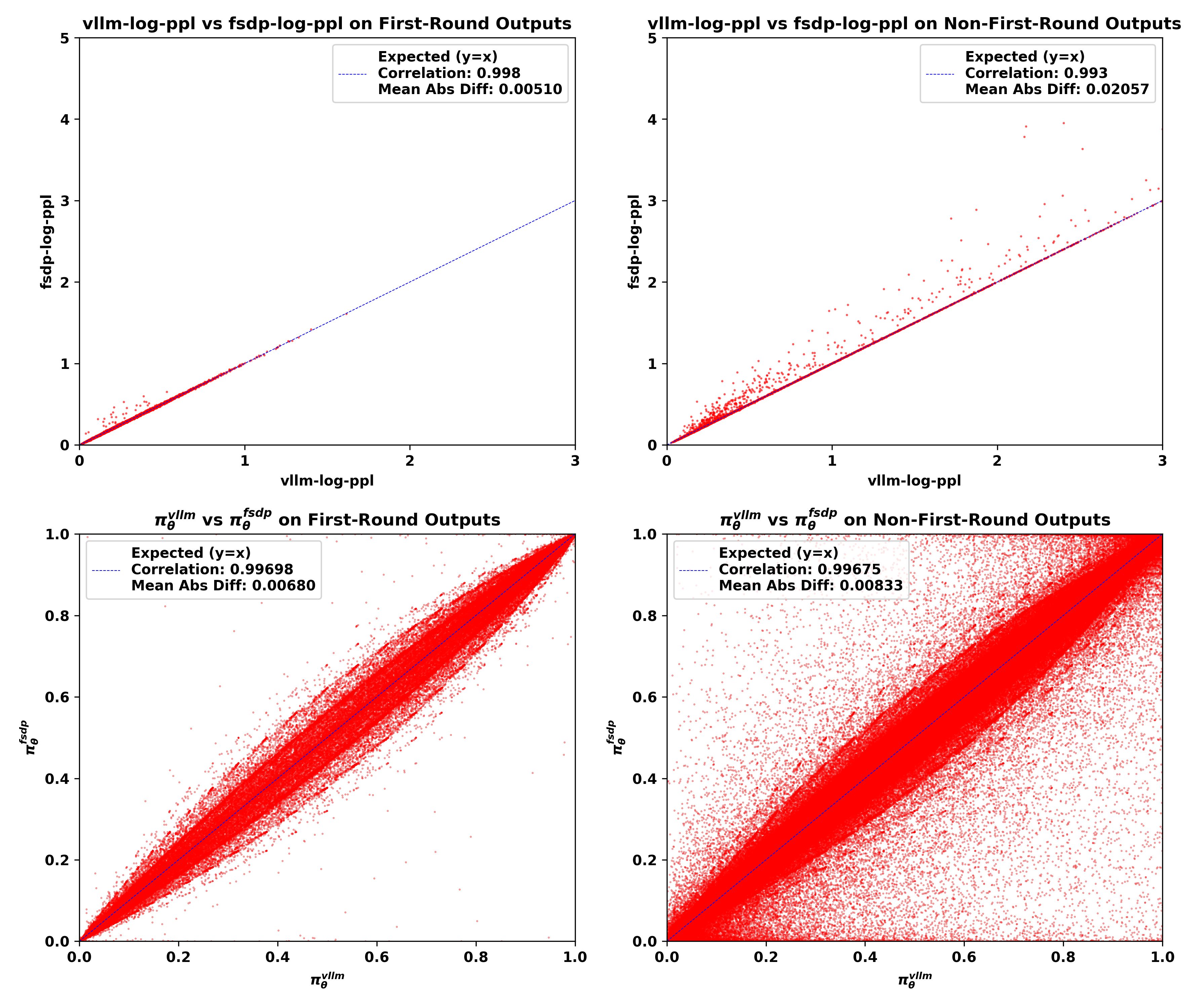
接下来,我们绘制三组批次(每组约5k条轨迹)中的不匹配,突出首轮模型输出和非首轮模型输出之间的差异。我们考虑以下两种方法来可视化不匹配:
1、 Log-ppl散点图:x轴表示由vLLM策略 \textcolor{red}{\pi^\text{infer}_\theta} 计算的ppl指标的对数,记为 vllm-log-ppl,y轴表示由FSDP策略 \textcolor{blue}{\pi^\text{train}_\theta} 计算的ppl指标的对数,记为 fsdp-log-ppl。
2、 概率散点图:x轴表示vLLM策略 \textcolor{red}{\pi^\text{infer}_\theta} 的token概率,y轴表示FSDP策略 \textcolor{blue}{\pi^\text{train}_\theta} 的token概率。
我们在下面展示三组的不匹配可视化结果。
- 组1:
vllm-kl≤ 1e-3的批次
- 组2:
vllm-kl∈ [1e-3, 2e-2]的批次
- 组3:
vllm-kl∈ [2e-2, 1e-1]的批次
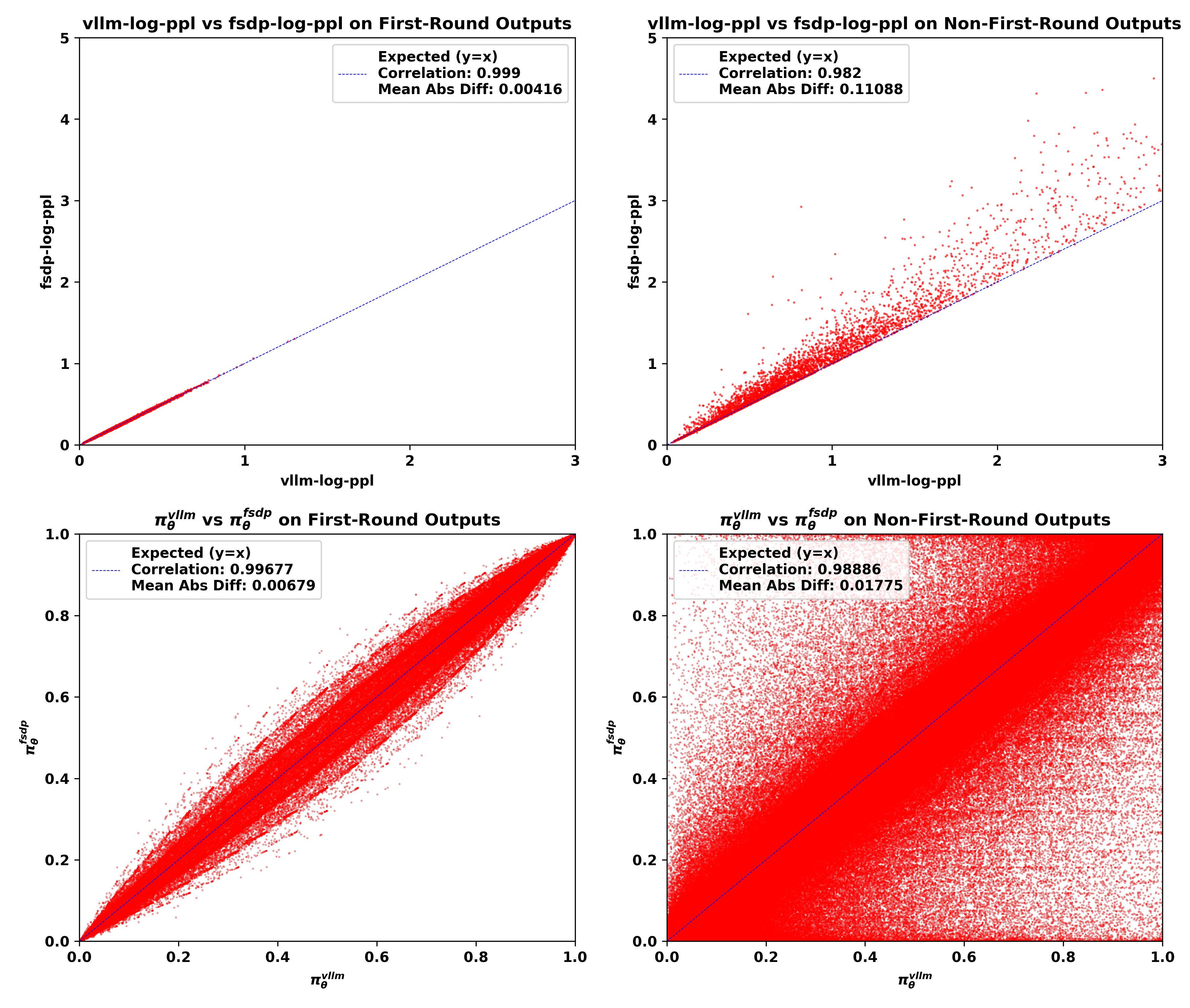
从可视化结果中,我们可以观察到:
1、 与首轮输出相比,非首轮输出的 vllm-log-ppl通常更大,这意味着面对不熟悉的分布外上下文时,模型采样了更多低概率token。
2、 不匹配主要发生在非首轮模型输出中,表现为FSDP策略和vLLM策略之间log-ppl和token概率的平均绝对差异更大,Pearson相关系数更低。
3、 随着 vllm-kl值的增加,训练-推理不匹配主要在非首轮输出中恶化。
4、 不匹配一致显示 fsdp-log-ppl大于 vllm-log-ppl,表明FSDP引擎产生了更极端的低概率token。
3.4.2 工具调用越多,训练越不稳定
以下实验进一步证明了分布外工具响应会加剧训练-推理不匹配和训练不稳定性。我们在H20 GPU上使用Qwen3-14B-Base作为基础模型进行了off-policy GRPO实验,clip higher=0.28,4个mini-batch。
我们将单条轨迹中工具调用的最大次数(超参数 max_tool_turn)设置为20和100。实验结果如图5和图6所示。可以观察到,随着工具调用次数的增加,训练崩溃发生的时间更早。崩溃时,所有情况下都观察到梯度爆炸和 vllm-kl急剧增大。
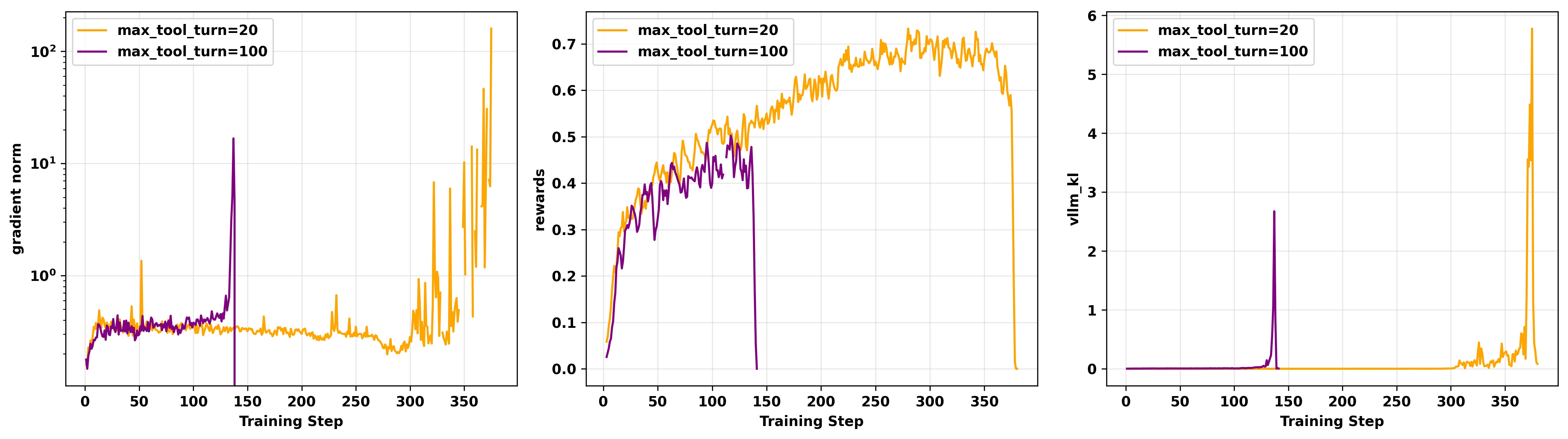
图5. 不同 max_tool_turn超参数值的off-policy GRPO实验的gradient norm(左)、奖励(中)和 vllm-kl指标(右)。所有实验都在H20 GPU上进行,使用Qwen3-14B-Base作为基础模型,clip higher=0.28,4个mini-batch。

图6. 不同 max_tool_turn超参数值的off-policy GRPO实验的工具调用最大次数(左)和平均次数(右)。所有实验都在H20 GPU上进行,使用Qwen3-14B-Base作为基础模型,clip higher=0.28,4个mini-batch。
3.5 环境因素:硬件的关键作用
最后,我们发现物理硬件是一个关键变量。完全相同的代码和模型在不同GPU硬件上产生了显著不同的不匹配程度。为评估不同硬件上的不匹配程度,我们使用相同的代码环境和超参数运行on-policy算法,仅在不同GPU之间切换进行推理和训练。图7展示了在L20、H20和A100上的训练动态。
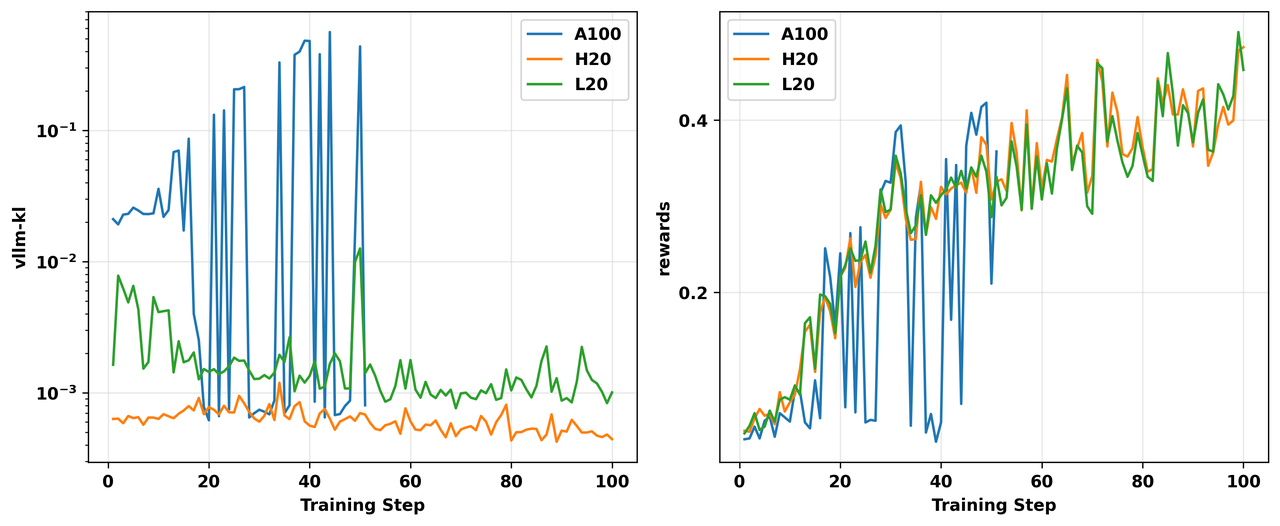
图7. 不同GPU上GRPO on-policy实验的 vllm-kl指标(左)和奖励(右)。所有实验都在相同的代码和环境上进行。
从图中可以观察到,在我们的实验中,vllm-kl的量级基本遵循:H20 < L20 < A100。具体来说,H20的 vllm-kl通常在5e-4到1e-3的数量级,L20约为1e-3到1e-2,而A100主要在1e-2到1之间。由于A100上严重的训练-推理不匹配,正常训练变得不可行,导致高度不稳定的奖励曲线。
我们发现在vLLM引擎中禁用级联注意力对于减少在A100 GPU上运行的实验中的不匹配特别有帮助。根本原因是FlashAttention-2 kernel中一个不易察觉的bug:
在A100(以及L20)上,特定的batch/sequence长度组合会触发kernel的 split_kv路径,该路径错误地转置了LSE(log-sum-exp)布局,导致Cascade Attention出现完全的精度崩溃,这正是我们观测到的巨大 vllm-kl的来源。
我们在4.2.4 在vLLM中禁用级联注意力中展示这些结果。
最直接的验证来自于当我们将一个失败的L20实验从检查点在H20 GPU上恢复时(见图8)。训练立即稳定并恢复,表明硬件对该问题具有关键影响。
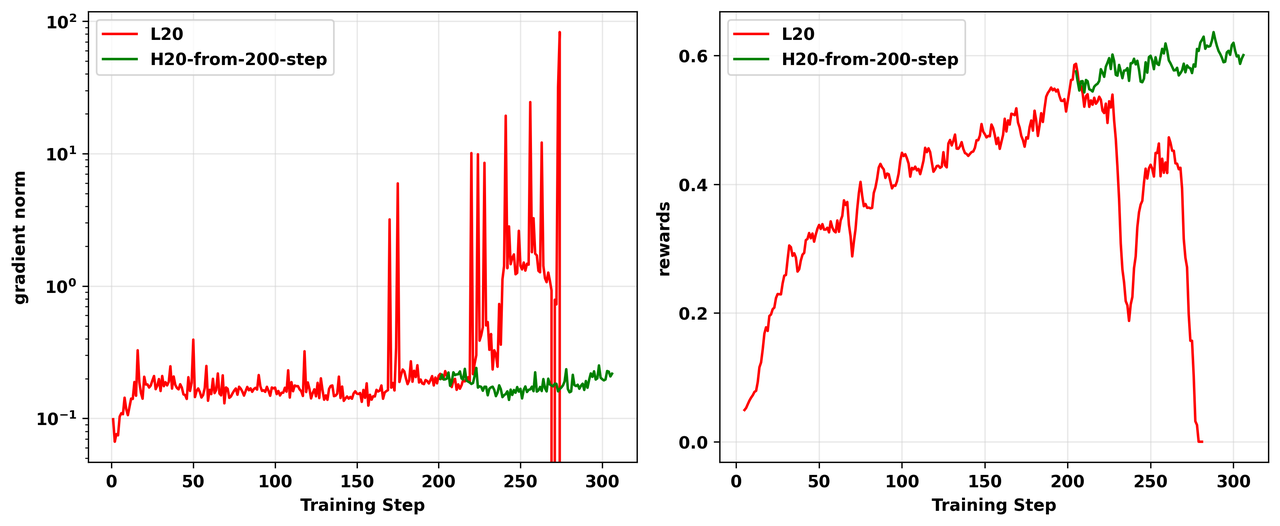
图8: L20和H20之间on-policy GRPO实验的对比结果,显示gradient norm(左)和奖励(右)。我们从失败的L20实验(红线)第200个训练步骤的检查点开始在H20 GPU上开始实验(绿线)
3.6 不匹配不是静态的:优化驱动的反馈循环
有人可能认为训练-推理不匹配是硬件和软件栈的静态属性。然而,我们下面的"批次过滤"实验表明不匹配与训练动态和模型状态是相互关联的。
我们在"批次过滤"实验中设置了以下策略更新策略:对于每个训练步骤,如果收集的批次产生的 vllm-kl指标大于阈值,我们跳过在该批次上更新模型参数,因为这样的更新容易导致训练崩溃。
相反,我们直接进入下一步,继续数据收集,直到获得 vllm-kl值低于阈值的批次,此时模型才被更新。
这个实验背后的逻辑是:如果不匹配程度完全独立于模型的输出分布和训练动态,那么 vllm-kl的量级在不同训练步骤之间应该表现出相同的分布。
然而,图9中的实验结果表明,一旦模型进入某种状态,它就会开始持续生成高不匹配批次,从而导致训练停滞。这一现象,以及在其他运行中观察到的 vllm-kl和 fsdp-ppl持续上升的模式(图10),指向一个反馈循环。
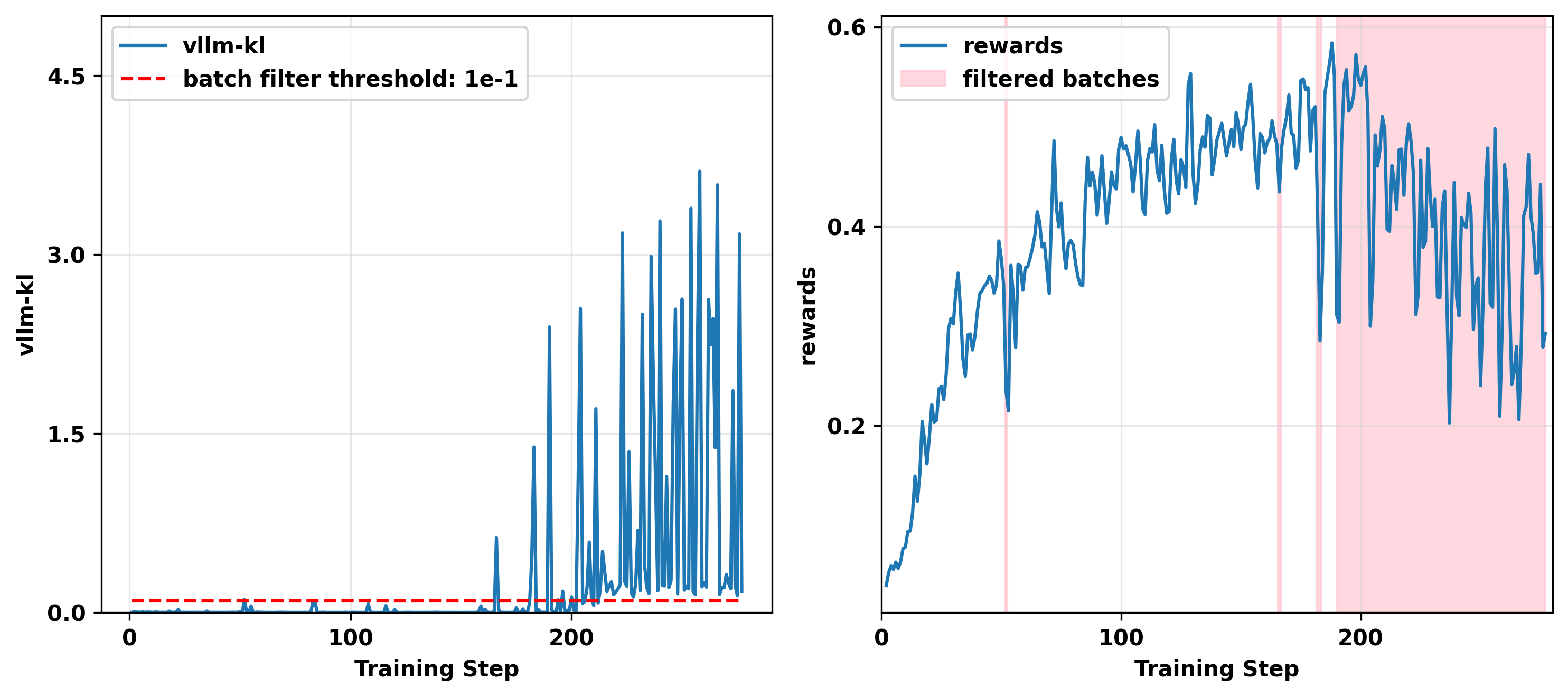
图9. 我们on-policy"批次过滤"实验的结果,显示 vllm-kl (左)和奖励*(右),被过滤掉批次的训练步骤用粉色标出。过滤阈值设置为0.1。*
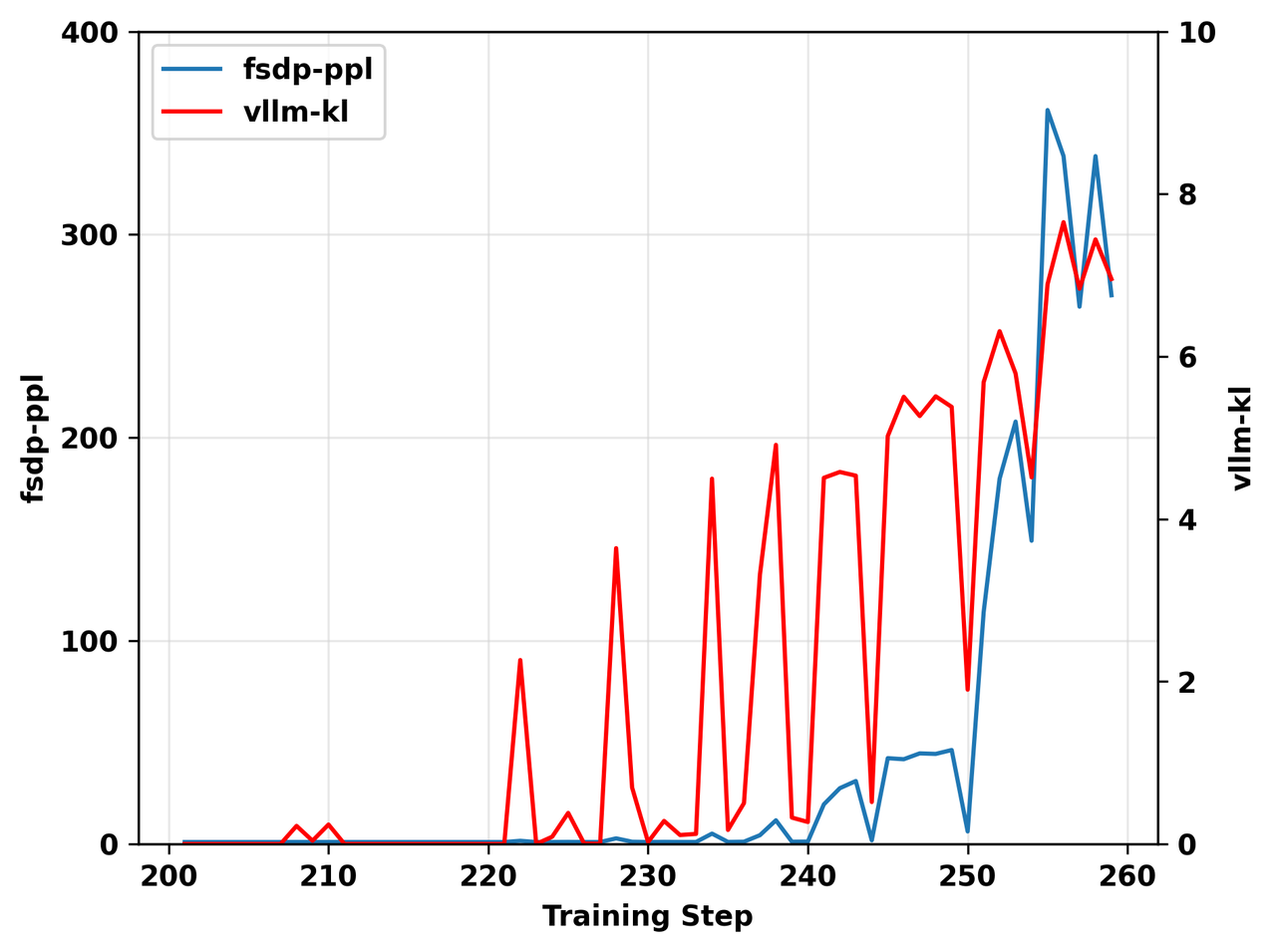
图10. 一个on-policy实验的结果,描绘了训练步骤上的 vllm-kl 和fsdp-ppl。两条线表现出相关的持续上升模式。
我们假设这是由于以下两阶段级联失效:
1、 阶段1:数值敏感性增加。 RL优化器将模型的权重推入 bfloat16数据类型相对精度较低的数值范围(例如非常小或非常大的值)。
2、 阶段2:Kernel驱动的误差放大。 这些初始的、微小的 bfloat16量化误差随后被输入到vLLM和FSDP的不同kernel中。不同的计算顺序会产生非线性放大效应,导致小的初始偏差在最终logits中累积放大为大的差异。
这形成了一个反馈循环:不匹配导致有偏差且噪声较大的梯度,可能将参数进一步推入数值敏感区域,进而使下一次迭代的不匹配进一步恶化,直到系统崩溃。
4. 缓解训练-推理不匹配的尝试
接下来,我们将列出尝试过的缓解训练-推理不匹配的方法。其中一些方法有所帮助,而另一些则无效。
4.1 无效尝试
4.1.1 使用FP32 LM Head
受到Minimax-M1技术报告和博客文章《你的高效RL框架悄悄地给你带来off-policy RL训练》的启发,我们修改vLLM将lm_head转换为fp32精度。
然而,在我们的实验中,修改后不匹配问题仍然存在,模型崩溃不可避免。图11展示了在L20 GPU上使用vLLM引擎中bf16 lm_head的失败的on-policy实验,以及从崩溃实验的第200个训练步骤开始在vLLM引擎上使用fp32 lm_head的实验。
可以观察到两个实验最终都崩溃了,使用fp32 lm_head的实验仍然表现出 vllm-kl急剧增大。
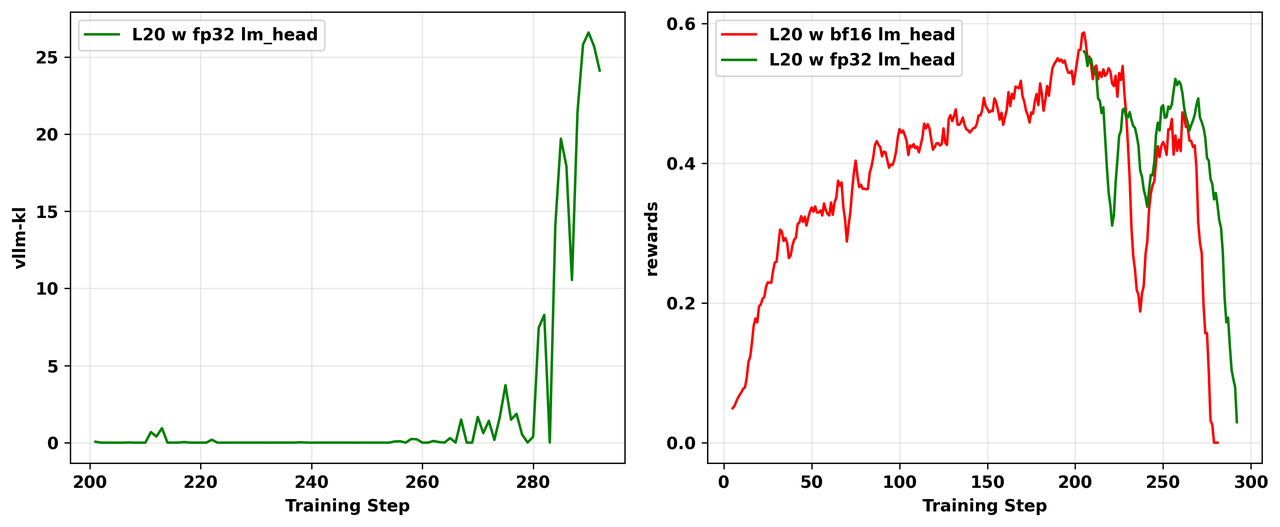
图11: vLLM引擎中lm_head精度的消融研究结果。左:vllm-kl指标的动态。右:训练奖励的动态。我们从使用bf16 lm_head的失败实验的第200个训练步骤开始,用fp32 lm_head*恢复RL训练。*
4.1.2 禁用分块预填充
我们还尝试从4.1.1节中使用bf16 lm_head的失败实验的第200个训练步骤恢复RL训练,禁用分块预填充以查看是否可以解决崩溃。然而,我们的实验结果(如图12所示)表明这种方法没有解决崩溃问题。
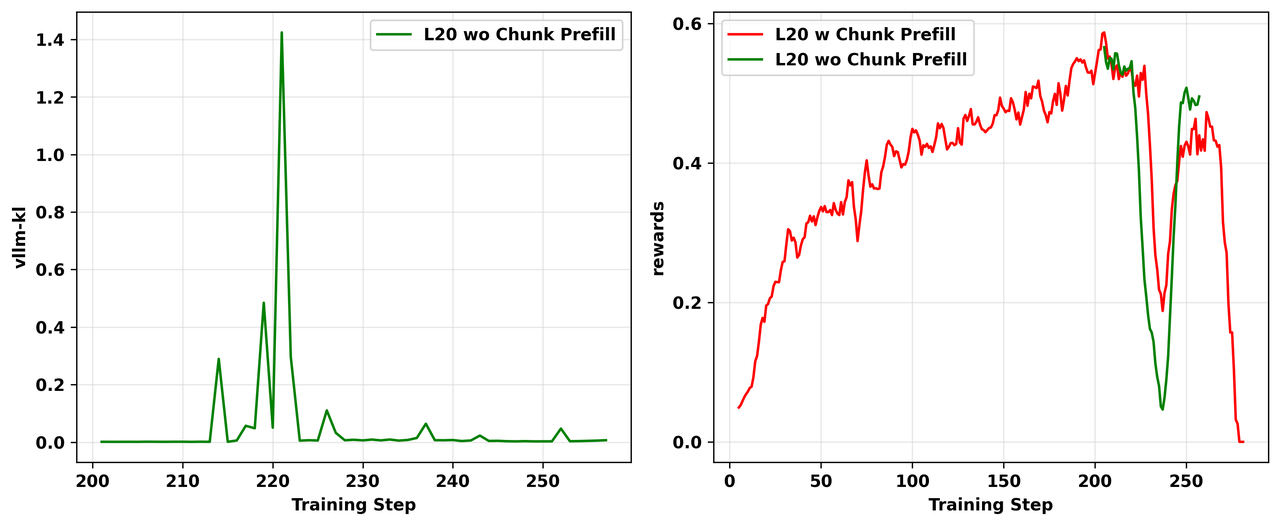
图12: 使用分块预填充的消融研究结果。我们从之前启用分块预填充进行的失败实验的第200个训练步骤开始,禁用分块预填充重新运行RL训练。 左:vllm-kl指标的动态。右:训练奖励的动态。
4.1.3 启用 enforce_eager和 free_cache_engine
VeRL的DAPO官方配方提到启用CUDA图(enforce_eager=False)可能导致模型性能下降。为了调查它是否影响训练-推理不匹配,我们进行了消融研究以检查vLLM引擎超参数 enforce_eager与另一个超参数 free_cache_engine的影响。
我们在reasoning RL上进行了实验。我们在H100 GPU上使用Qwen3-4B-Base作为基础模型进行on-policy GRPO实验,共运行四种实验设置:超参数 enforce_eager和 free_cache_engine的穷举组合,每个设置为 True或 False。性能在AIME24基准上评估。实验结果如图13所示。
从图中可以看出,调整 enforce_eager和 free_cache_engine的值对训练-推理不匹配和测试性能没有显著影响。
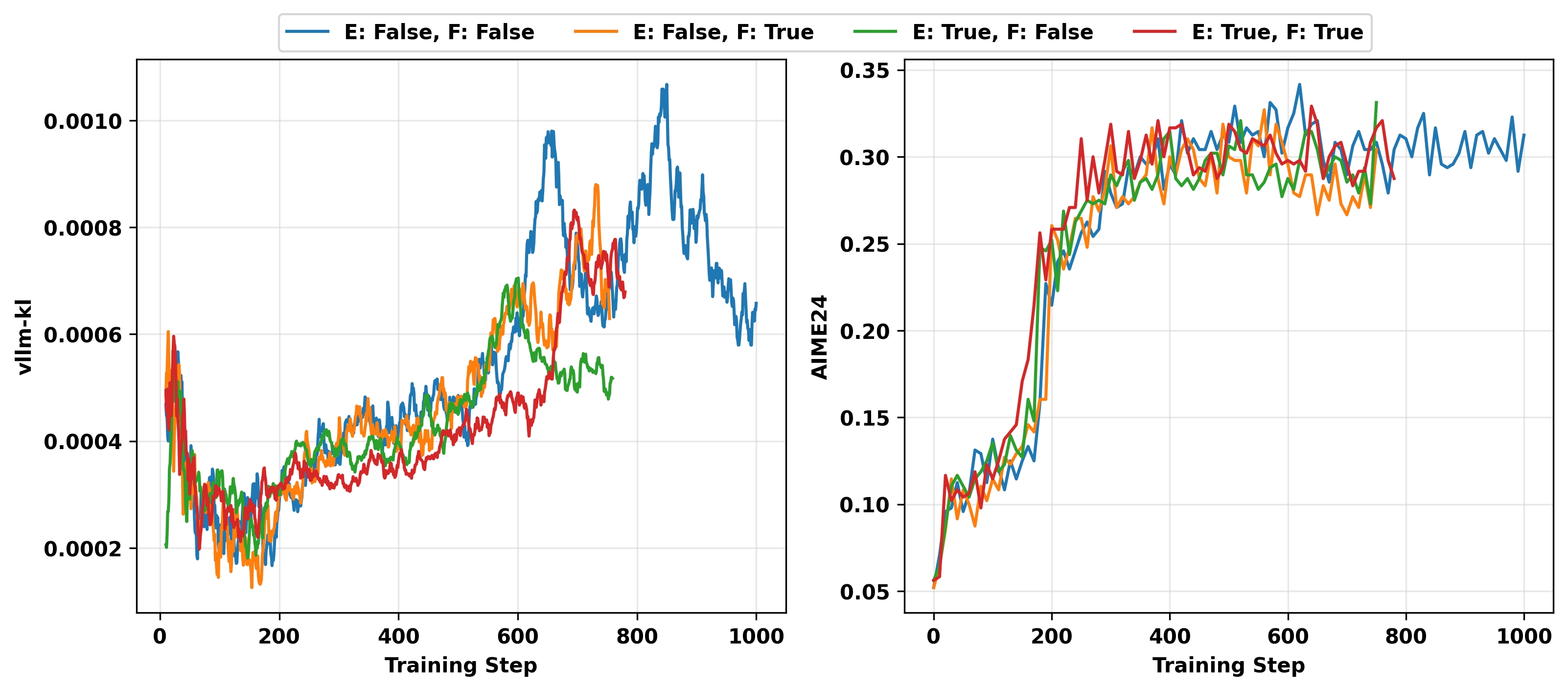
图13: reasoning RL中 vLLM 加速和缓存相关超参数的消融研究。我们在H100 GPU上用超参数 enforce_eager(E)和 free_cache_engine(F)的四种可能组合进行on-policy GRPO实验。左:vllm-kl指标的动态。右:AIME24准确率的动态。
4.2 有效尝试
4.2.1 原理性解决方案:分布校正
训练-推理不匹配将我们原本的on-policy RL问题变成了off-policy问题,其中用于生成rollout的策略(behavior policy,\textcolor{red}{\pi_{\theta}^{\mathrm{infer}}})与正在训练的策略(target policy,\textcolor{blue}{\pi_{\theta}^{\mathrm{train}}})不同。校正这种分布偏移的一个理论上可行的方法是重要性采样(importance sampling,IS)。然而,重要性采样的具体形式对于保持无偏梯度和实现稳定训练至关重要。
受(Yao et al., 2025)的发现启发——该工作首次强调了由于训练-推理不匹配而导致的这种隐式off-policy问题——我们分析了两种主要的重要性采样形式:理论上可行的sequence级别IS和常见但有偏的token级别IS近似。
有原理依据的估计器:sequence级别IS
正确的、无偏的策略梯度估计器对整个生成的序列(轨迹)y 应用单一的重要性比率。这正确地将期望从behavior policy重新加权到target policy,产生目标函数 J(\theta) 的真实梯度。
让我们逐步推导sequence级别IS估计器 g_{\mathrm{seq}}(\theta)。
1、 目标是最大化目标FSDP策略下的期望奖励:
2、 因此真实的策略梯度是:
3、 由于我们只能从vLLM策略进行采样,我们使用重要性采样来转换期望的分布:
这本质上是off-policy REINFORCE算法(Williams, 1992)。这个估计器在数学上等价于策略梯度的标准优势形式。关键在于证明重要性采样比率能精确校正期望,揭示出隐藏在下面的真实on-policy梯度,然后可以进一步细化。最终的优势形式为:
其中,s=(x,y_{<t}) 是状态(前缀),a=y_t 是动作(token)。项 d_{\textcolor{blue}{\pi_{\theta}^{\mathrm{train}}}} 是目标FSDP策略下的状态占用度量(state occupancy)。它被正式定义为遵循策略 \pi 时访问状态 s 的期望次数:
这个估计器是无偏的,意味着 g_{\mathrm{seq}}(\theta) = g(\theta)。为了数值稳定性,使用截断重要性采样(Truncated Importance Sampling,TIS),它将sequence级别比率 \rho(y|x) 裁剪在常数 C。
一个常见的有偏估计器:Token级别IS
一种常见的启发式方法,通常受PPO等算法启发并在(Yao et al., 2025)中使用,采用逐token的重要性比率。虽然这通常比sequence级别比率具有更低的方差,但它是一个对自回归模型理论上不成立的有偏估计器。
让我们推导Token级别IS梯度估计器,g_{\mathrm{tok}}(\theta)。
1、 该公式首先在时间步求和内部错误地应用重要性采样比率:即 g_{\mathrm{tok}}(\theta) 定义为
2、 我们可以将这个轨迹上的期望重写为vLLM策略下访问的状态上的期望:
3、 注意:这里, R(x,y) 是由 \textcolor{red}{\pi_{\theta}^{\mathrm{infer}}} 采样的完整轨迹的经验回报,它作为状态-动作价值 Q^{\textcolor{red}{\pi_{\theta}^{\mathrm{infer}}}}(s,a) 的Monte Carlo估计。 引入基线并改变动作上的期望给出最终形式:
这个最终表达式清楚地揭示了token级别IS的梯度偏差。可以清楚地观察到,J(\theta) 能够被 g_\text{tok}(\theta) 优化当且仅当 \textcolor{red}{\pi_{\theta}^{\mathrm{infer}}} 保持在 \textcolor{blue}{\pi_{\theta}^{\mathrm{train}}} 的置信域(trust region)内,此时 d_{\textcolor{red}{\pi_{\theta}^{\mathrm{infer}}}}\approx d_{\textcolor{blue}{\pi_{\theta}^{\mathrm{train}}}} 且 A^{\textcolor{red}{\pi_{\theta}^{\mathrm{infer}}}}\approx A^{\textcolor{blue}{\pi_{\theta}^{\mathrm{train}}}}。
Token级别IS中的偏差来源
将 g_{\mathrm{tok}}(\theta) 与真实梯度 g_{\mathrm{seq}}(\theta) 进行比较,揭示了两个独立且重要的错误,使token级别估计器有偏。
来源1:状态占用不匹配
合理的off-policy校正必须考虑两个分布偏移:动作概率和状态访问概率。Token级别方法只校正了第一个。
- 真实梯度(g_{\mathrm{seq}}): 期望是关于正确的目标FSDP分布下访问的状态的,\mathbb{E}_{s \sim d_{\textcolor{blue}{\pi_{\theta}^{\mathrm{train}}}}}。
- 有偏梯度(g_{\mathrm{tok}}): 期望是关于不正确的behavior vLLM分布下访问的状态的,\mathbb{E}_{s \sim d_{\textcolor{red}{\pi_{\theta}^{\mathrm{infer}}}}}。
这隐式地假设状态占用比率是1,即 {d_{\textcolor{blue}{\pi^{\mathrm{train}}}}(s)} /{d_{\textcolor{red}{\pi^{\mathrm{infer}}}}(s)} = 1。这个假设在自回归模型中严重不成立;由于确定性转移,单个不同的token选择会导致状态轨迹完全发散。通过忽略这一点,g_{\mathrm{tok}}(\theta) 引入了一个大的、不可控的偏差。
来源2:奖励信号不匹配
第二个关键错误是token级别梯度用来自错误策略的奖励信号来加权更新。
- 真实梯度(g_{\mathrm{seq}}): 更新按目标FSDP策略的优势函数缩放,A^{\textcolor{blue}{\pi_{\theta}^{\mathrm{train}}}},表示该策略下的期望未来奖励。
- 有偏梯度(g_{\mathrm{tok}}): 更新按behavior vLLM策略的优势函数缩放,A^{\textcolor{red}{\pi_{\theta}^{\mathrm{infer}}}}。
Target policy的梯度被属于behavior policy的奖励信号缩放。由于状态分布和奖励信号都存在根本性的不匹配,token级别梯度是一个有偏且理论上不成立的估计器。
这些理论表明,尽管token级别方法可能具有较低的方差,但梯度偏差仍然存在,可能导致训练不稳定——我们接下来的实验证实了这一预测。 我们还在(Part 1 & Part 2)中给出了token级别和sequence级别方法的详细偏差和方差分析。
实验验证
我们的理论分析预测有偏的token级别IS将是不稳定的并最终失败,而无偏的sequence级别IS将是稳健的。我们的实验证实了这一点。
IS防止梯度爆炸,但Token级别仍然失败
我们从L20 GPU上崩溃实验的第200个训练步骤恢复,分别使用token级别TIS和sequence级别TIS(C=2)。如图14所示,虽然两者最初都防止了朴素实验中看到的梯度爆炸,但使用token级别TIS的运行后来仍然崩溃。使用sequence级别TIS的运行保持稳定,验证了我们的理论,即token级别方法的有偏梯度最终导致失败。
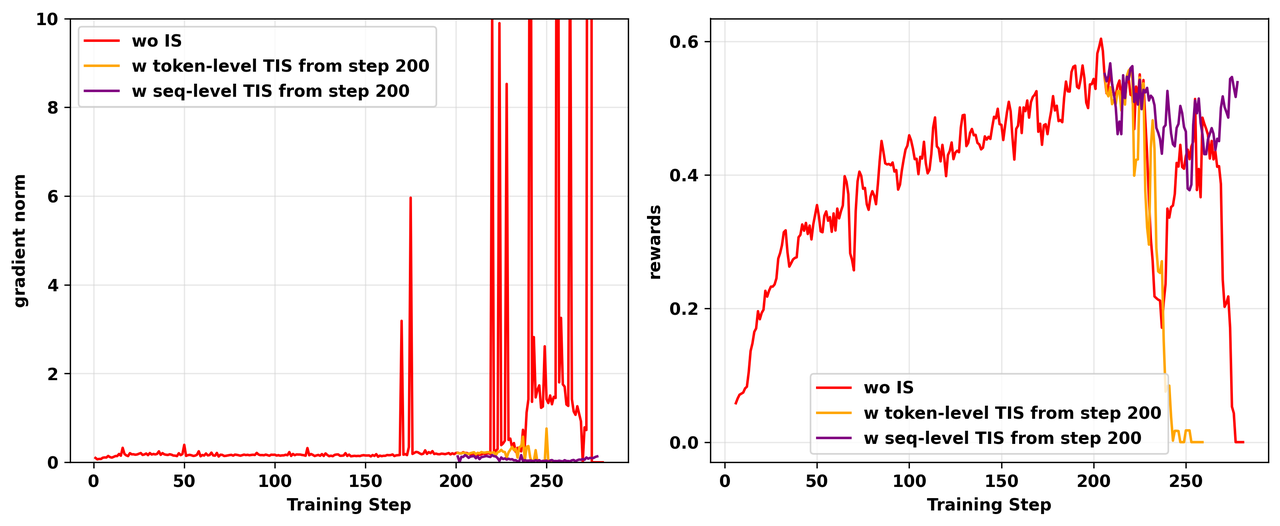
图14: 不同TIS策略使用的消融研究。不使用IS的朴素on-policy实验在200步后崩溃并经历梯度爆炸。我们分别从第200个训练步骤开始,添加token级别TIS和sequence级别TIS*策略恢复RL训练。左:RL训练期间gradient norm的动态。右:RL训练期间训练奖励的动态。*
reasoning RL中的Token级别TIS
虽然token级别TIS在我们复杂的TIR实验中失败,但在更简单的reasoning RL中它可以帮助防止崩溃,因为那里的不匹配程度较小。在on-policy GRPO和RLOO实验中(图15),token级别TIS防止了梯度爆炸,但训练仍然不稳定,没有达到更好的最终性能,这可能是由于底层的梯度偏差。
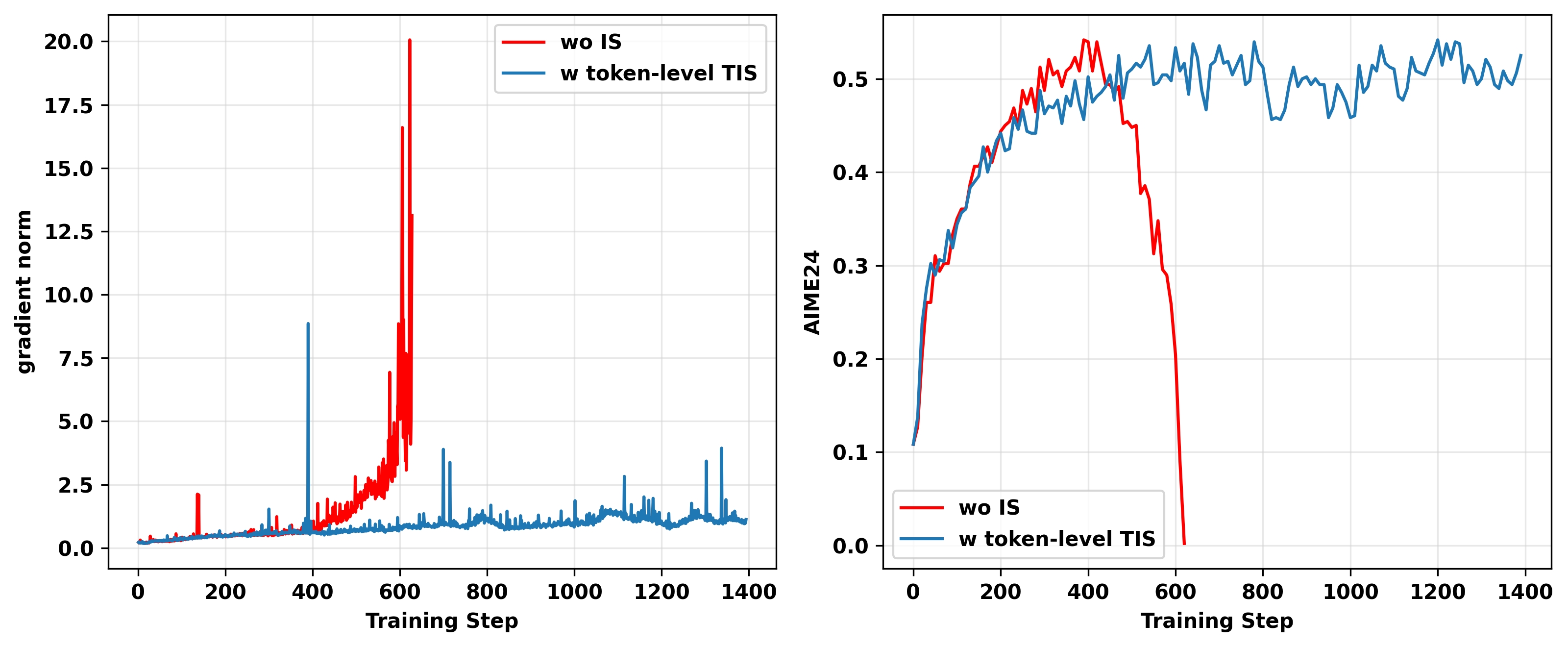
图15(a): H100 GPU上on-policy GRPO实验的gradient norm(左)和AIME 24准确率(右),分别为无IS和有token级别IS(C=2)的reasoning RL。Token级别TIS防止训练崩溃但没有达到更好的测试性能。
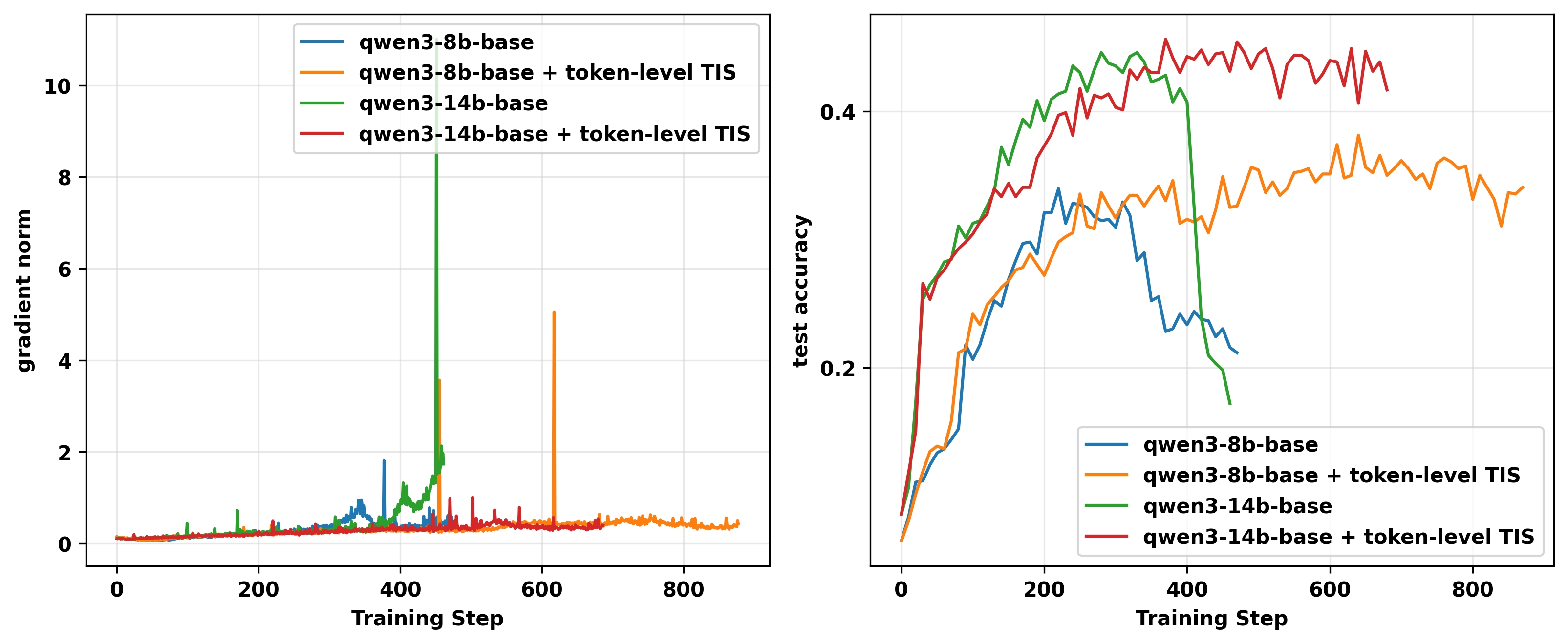
图15(b): H100 GPU上on-policy RLOO实验的gradient norm(左)和AIME 24/AIME25平均准确率(右),分别为无IS和有token级别IS(C=2)的reasoning RL。Token级别TIS缓解训练崩溃但没有达到更好的测试性能。在后期阶段,TIS有性能下降的趋势。
TIS延长训练但可能遭受不稳定性
我们在L20 GPU上从头开始进行on-policy TIR实验,使用sequence级别TIS(C=2)。如图16所示,虽然该方法防止了完全崩溃,但奖励曲线在达到平台后表现出持续波动,其测试性能没有超过朴素实验崩溃前达到的峰值。
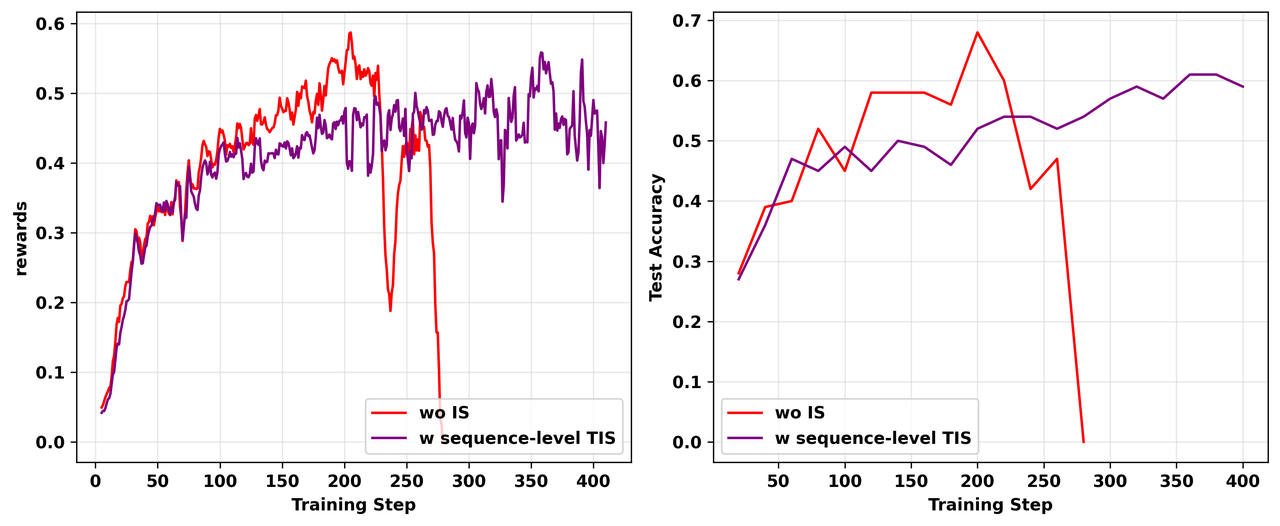
图16: 不同TIS策略使用的消融研究(续)。不使用IS的朴素on-policy实验在200步后崩溃。我们从头开始使用相同配置重新运行失败的实验,添加 C=2 的sequence级别TIS。左:RL训练期间训练奖励的动态。右:RL训练期间测试准确率的动态。
掩码重要性采样(MIS)
为改进TIS,我们提出掩码重要性采样(Masked Importance Sampling,MIS),它对IS比率超过阈值 C 的序列掩盖策略损失(即 \rho(y|x) \gets \rho(y|x) \mathbb{I}\{\rho(y|x) \le C\})。如图17所示,MIS不仅稳定了训练,还超过了朴素和TIS实验的峰值训练奖励和测试准确率。
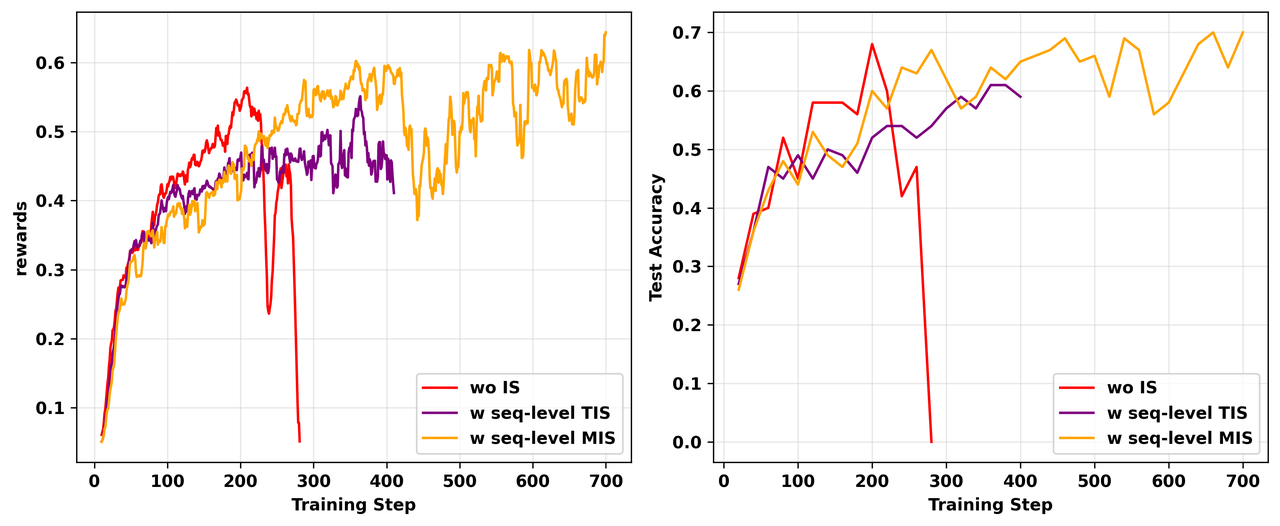
图17: on-policy GRPO与sequence级别MIS、TIS和不使用IS的朴素版本的比较。所有三个实验都在L20 GPU上进行。与朴素on-policy实验相比,MIS和TIS的引入都延长了训练持续时间,但两者在后期阶段也遭受了训练不稳定性。与TIS相比,MIS在训练奖励和测试集准确率上都有所改进,也超过了不使用IS的朴素实验的峰值性能。左:RL训练期间训练奖励的动态。右:RL训练期间测试准确率的动态。
Token级别MIS vs. sequence级别MIS
最后,我们比较了token级别MIS和sequence级别MIS。如预期,图18显示虽然两者都防止了初始的梯度爆炸,但token级别MIS实验仍然崩溃。这强化了我们的结论:对于复杂的、长时间范围的自回归任务,只有理论上成立的sequence级别校正才是可靠的。
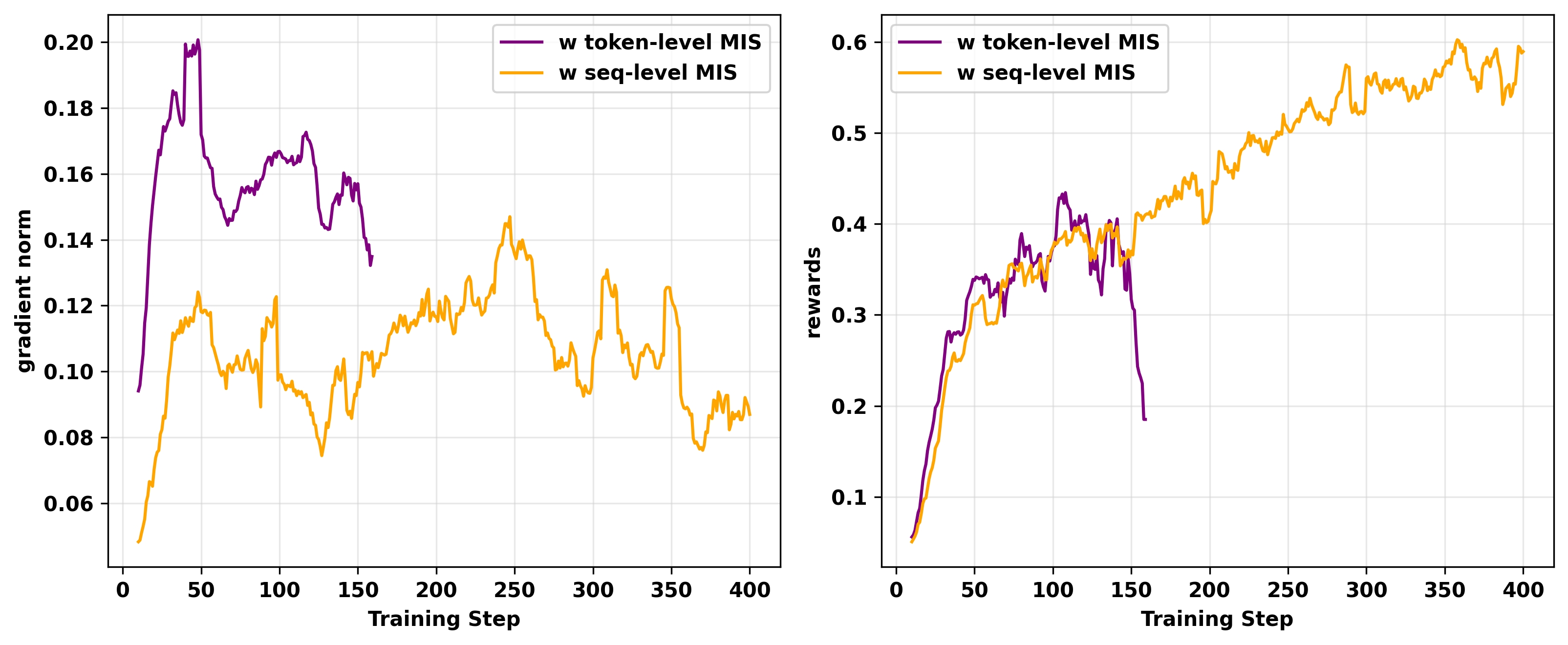
图18: on-policy GRPO与token级别MIS和sequence级别MIS的比较。两个实验都在L20 GPU和相同配置上进行。左:RL训练期间gradient norm的动态。右:RL训练期间训练奖励的动态。
4.2.2 Top-p采样
如上所述,我们观察到vLLM策略的低概率token更容易出现严重的训练-推理不匹配问题,导致FSDP策略的概率极低。为进一步证实这一点,我们进行了以下top-p消融研究。
我们在L20 GPU上运行on-policy GRPO实验,将vLLM采样策略的 top-p超参数分别设置为0.98、0.99和0.999(注意我们没有应用重要性采样进行梯度校正)。通过设置较小的 top-p值,我们旨在减少推理阶段极低vllm概率token的频率,从而缓解训练-推理不匹配。我们的消融结果如图19所示。
如预期,vllm-kl指标表明较小的 top-p减少了 vllm-kl尖峰的发生。然而,需要注意的是,较小的 top-p也增加了vLLM策略 \textcolor{red}{\pi^{\text{infer}}_\theta} 和FSDP策略 \textcolor{blue}{\pi^{\text{train}}_\theta} 之间的分布差异。因此,在不应用TIS的情况下,梯度偏差变得更大,导致随着 top-p减小,奖励改进更慢。
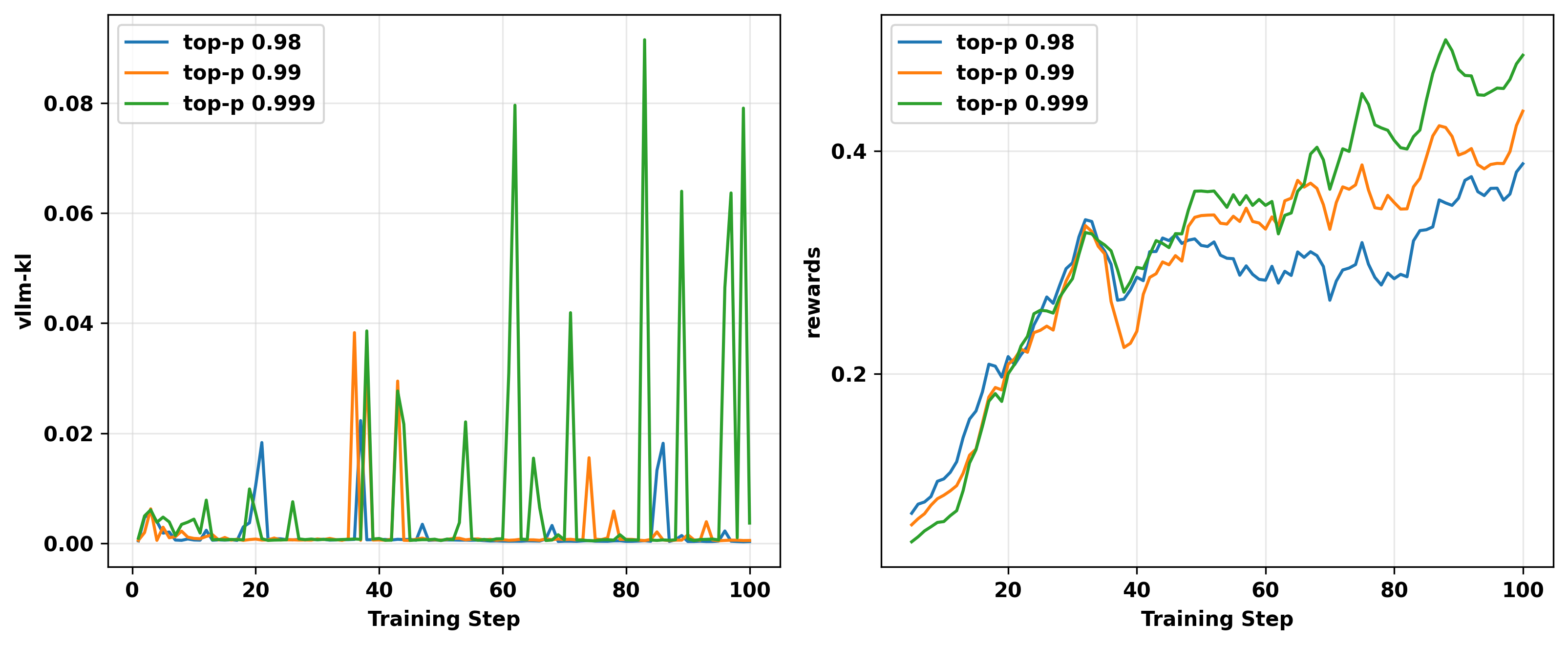
图19: RL训练期间 vLLM 采样策略中不同 top-p值使用的消融研究。我们运行了 top-p分别等于0.98、0.99和0.999的on-policy GRPO实验。可以观察到,设置较小的 top-p值通常产生较小的 vllm-kl指标和较慢的奖励改进。左:RL训练期间 vllm-kl指标的动态。右:RL训练期间训练奖励的动态。
4.2.3 使用其他GPU系列
在发现H20 GPU上运行的实验中训练-推理不匹配显著小于L20 GPU后,我们将所有TIR实验切换到H20 GPU,这大大减少了训练崩溃的发生。图20展示了在相同配置下分别在L20和H20 GPU上从头训练的两个on-policy GRPO实验的结果。
可以观察到,在H20 GPU上运行的on-policy实验显著延长了稳定训练持续时间并取得了更好的性能。
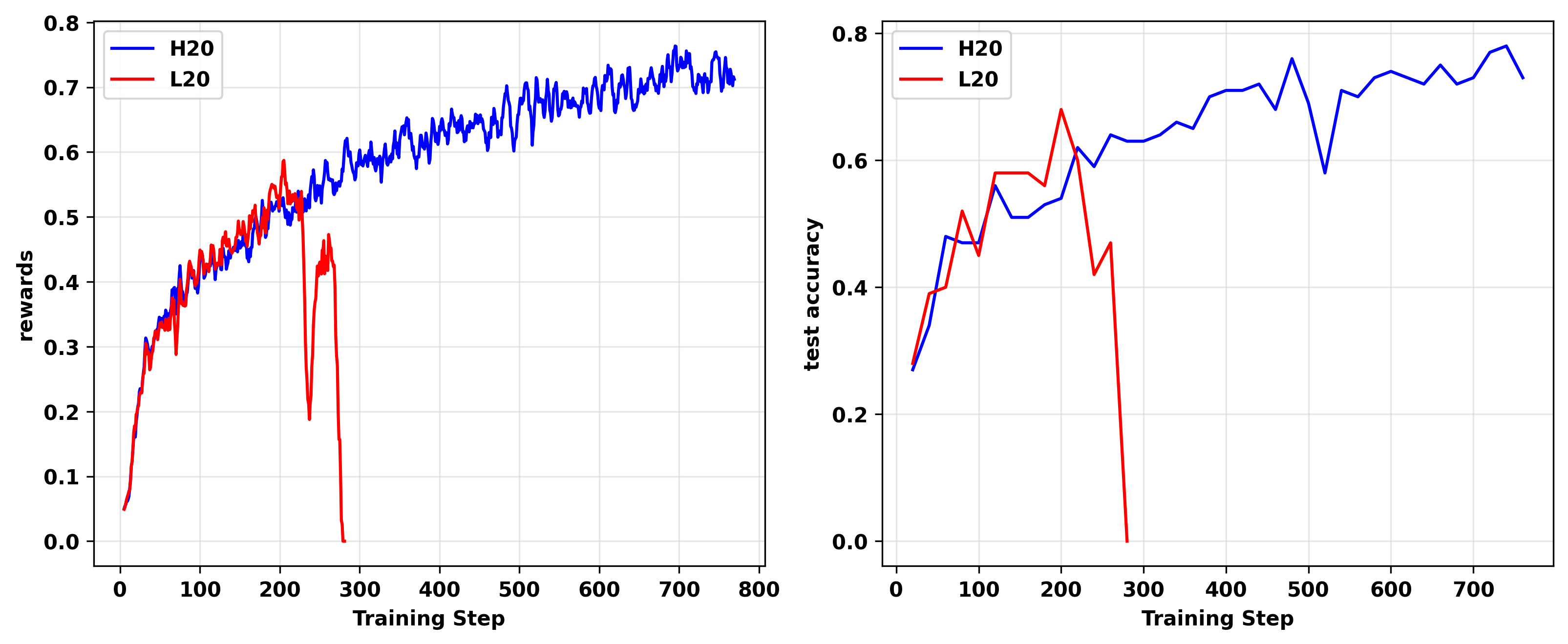
图20: 分别在L20和H20 GPU上进行的两个on-policy GRPO实验的训练奖励(左)和测试准确率(右)。
4.2.4 在vLLM中禁用级联注意力
根据这个GitHub issue,我们在初始化vLLM引擎时设置 disable_cascade_attn=True,发现它显著帮助减少在A100 GPU上进行的实验中的训练-推理不匹配。
我们使用Qwen3-14B-Base作为基础模型在A100 GPU上进行了两个on-policy GRPO实验,disable_cascade_attn分别设置为 True和 False。结果如图21所示。
可以观察到,禁用级联注意力后,vllm-kl指标从5e-2到1e-1的范围下降到1e-3左右,表明训练-推理不匹配大幅减少。此外,训练集上的奖励也相应增加。
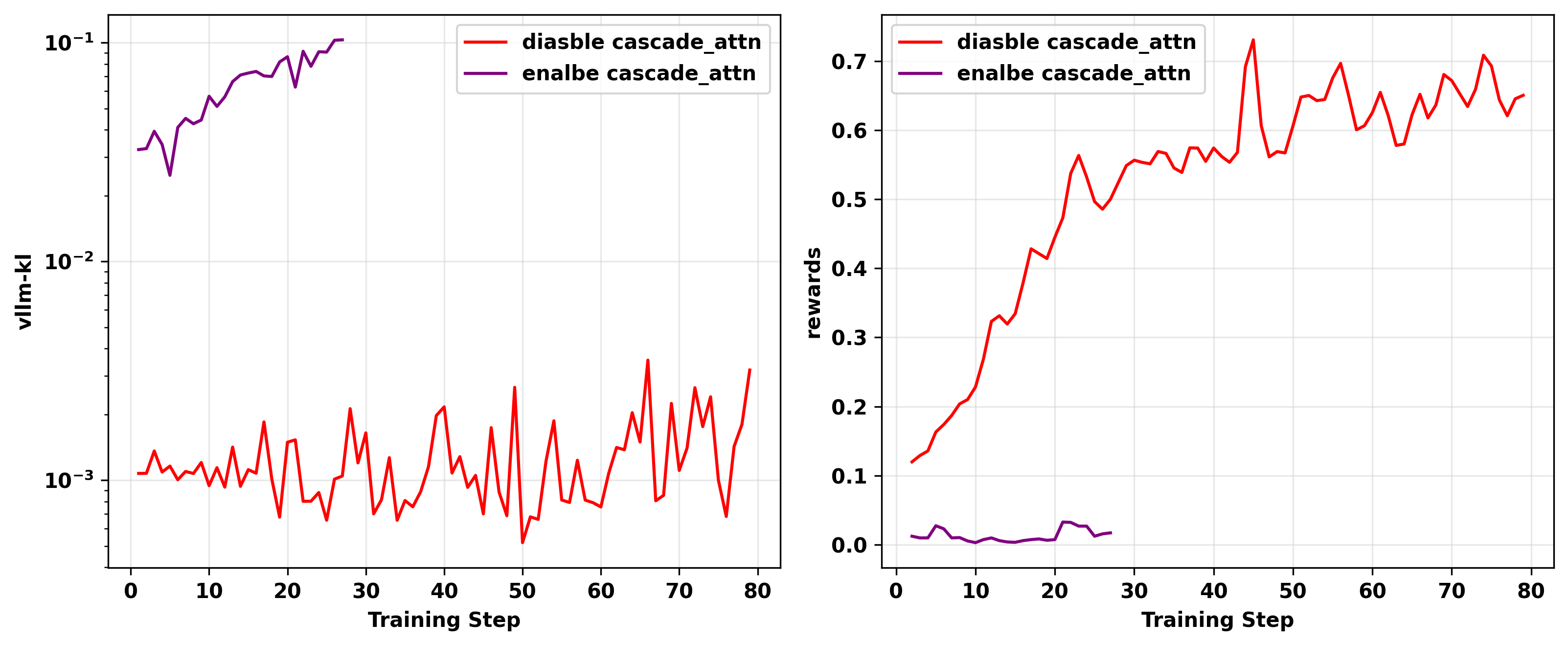
图21: 使用级联注意力的消融研究结果。我们在A100 GPU上进行了两个on-policy实验:一个启用级联注意力,另一个使用相同配置但禁用级联注意力。左:vllm-kl指标的动态。右:训练奖励的动态。
5. 结论与实践者要点
训练-推理不匹配不是一个小众bug,而是现代reasoning和agent RL中一个根本性的、日益严峻的挑战,源于对性能的必然追求。我们的研究为诊断和缓解这一问题提供了清晰的路线图。
1、 不匹配是不可避免的权衡: 高速推理将始终与训练计算存在差异。这是核心权衡,而非临时缺陷。
2、 监控系统健康状态: train-infer-kl/vllm-kl指标是一个重要的早期预警系统。将它与困惑度(PPL)和梯度范数一起跟踪,以在崩溃发生之前预测和诊断不稳定性。
3、 识别问题根源: 问题并非随机发生。它被低概率token系统性地触发,而当模型处理分布外(OOD)输入时,这些token会更频繁地生成——这是tool-use和多轮应用中的常见场景。
4、 硬件是一阶变量: 相同的代码可能在一个GPU架构上崩溃而在另一个上完美训练。务必在目标硬件上验证你的设置,因为结果可能无法完全移植。
5、 使用理论上可靠的校正方法: 虽然更换硬件或调整采样器可以有所帮助,但最稳健且有原理依据的解决方案是算法性的。我们的工作证明了理论上有偏的token级别校正是不够的,在我们的实验中仍然可能失败。
相比之下,sequence级别方法如截断重要性采样(Seq-TIS)和掩码重要性采样(Seq-MIS) 通过校正完整的状态轨迹直接解决梯度偏差。这些方法对于保持稳定性至关重要,应该被视为任何严肃的LLM-RL训练栈的默认配置。
我们假设推理引擎(如vLLM)和训练框架(如Megatron-LM)之间的这种不匹配对于混合专家模型(MoE)RL也将是一个重要问题,这代表了一个有趣且关键的未来研究方向。