作者:小红师兄
https://zhuanlan.zhihu.com/p/1980358735869268796
今天聊聊AdaMoE(VLA),先用一句话概括一下:AdaMoE 这篇论文想解决的是「在 Vision-Language-Action (VLA) 模型里用 Mixture-of-Experts(MoE)扩容时,路由器既要负载均衡、又要让专家真正各司其职,这两个目标经常互相打架」的问题。
作者的核心观点是:“专家不需要垄断舞台(expertise need not monopolize)”——也就是说,不需要某一个专家一旦被选中,就在输出里占据绝对话语权;选择哪些专家、以及这些专家贡献多大权重,这两件事本来就不该绑死在一起。
背景
VLA 模型(OpenVLA、π0 等)已经在机器人操作任务上做得不错,可以把视觉、语言和动作统一在一个端到端框架里。
在大规模 Vision-Language 模型里,MoE 是非常成熟的一种扩容方式,比如 MoE-LLaVA、DeepSeek-VL2、Kimi-VL 等,它们都靠稀疏专家带来更强能力、但推理开销基本不涨。
机器人这边也很自然想:能不能把已有的 VLA 基座模型(比如 π0)改造成 MoE,一方面继承原来的知识,另一方面靠 MoE 扩容、提高性能、还保持推理成本可控?
问题在于:机器人操作里的 MoE 路由,比起纯语言任务更容易「翻车」。作者的发现是:
- 负载均衡(load balancing)如果太强,会损伤任务性能;
- 负载均衡如果太弱,又会出现 expert collapse:大部分 token 都流向少数专家,其它专家几乎不工作;
- 本质上,负载均衡损失希望专家使用得平均一些,而任务目标其实希望专家高度「偏心」——不同任务、不同操作场景,本来就该让少数专家主导决策。
在传统 MoE 架构里,这两个目标是通过同一套 router logits 来优化的,结果就是:
router 同时要负责:1)选谁上场;2)每个人贡献多少。
这两个目标对 logits 的要求又是互相冲突的,训练就容易收敛到一个谁都不太满意的「折中」。
AdaMoE 的核心就是:
- 继续用 MoE 来扩 π0 的 action expert;
- 但在路由层面,把「选专家」和「给权重」这两件事解耦,用一个额外的 scale adapter 专门负责「贡献多大」。
下面用一个小例子来理解这件事:
想象一个桌面整理机器人,任务指令是「把桌面上的蓝色杯子收进右侧的收纳盒」。
- 它需要看多视角相机画面,理解语言指令;
- 然后输出一段动作序列:靠近杯子 → 抓稳 → 抬起 → 平移到盒子上方 → 放下。
这些操作里,看上去都叫「整理桌面」,但所需的微操技能其实挺多样:抓握、避障、细腻放置……各个专家就像不同风格的「抓杯子/移动/放置」专家。 AdaMoE 想做的是:既要让多位专家上场协作,又不要让某一个人永远抢戏、其他人长期闲置。
AdaMoE 做了哪些设计?
按照论文的结构,方法部分主要有三块:
- 在 π0 的框架下,用条件流匹配(conditional flow matching)来建模机器人动作分布;
- 在 π0 的 action expert 里引入一个 MoE 架构,分为 shared experts 和 routed experts,并配套负载均衡 loss;
- 针对传统 MoE 中「选择 = 权重」的耦合问题,引入 scale adapter,把专家选择和权重解耦。
对应到我们的「桌面整理机器人」例子:
- 整体上还是用 π0 那套「从噪声开始、逐步去噪」的流匹配方式,去生成一整段高频控制动作;
- 原本 π0 里负责「理解当前动作 token 该怎么变好」的那一块 action expert,现在被换成了带 MoE 的版本:有专门做通用动作的 shared expert,也有专门负责某些动作模式(比如抓、放、横移)的 routed experts;
- 为了不让 router 又要负责平衡使用率、又要负责谁该更重要,作者额外加了一个结构一致的 scale adapter,专门调节专家的贡献强度。
模型架构细节
Problem formulation:条件流匹配下的控制问题
AdaMoE 是在一个已经训练好的 VLA 基座模型 π0 上做 MoE 扩展的。π0 本身是一个基于 flow matching 的 VLA 模型,用来做高频率的动作控制。
在每个时间步 t,模型接收一个观测 \mathbf{O}_t,里面包括:
- 多视角的 RGB 图像;
- 一条语言指令;
- 机器人本体状态(关节角度、夹爪状态等)。
论文中写的是:
- 观测: \mathbf{O}_t = [\mathbf{I}_1^t,\ldots,\mathbf{I}_n^t, \ell_t, \mathbf{q}_t],其中 \mathbf{I}_i^t 是第 i 个相机在时刻 t 拍到的图像,\ell_t 是自然语言指令,\mathbf{q}_t 是机器人的本体状态(proprioceptive state)。
- 动作 chunk: \mathbf{A}_t = [a_t, a_{t+1}, \ldots, a_{t+H-1}]
表示未来 H 步的高频动作序列。
控制问题就是学习一个条件分布 \pi(\mathbf{A}_t \mid \mathbf{O}_t) ,让机器人根据当前观测,输出一整段未来动作。
在桌面整理的例子里:
- \mathbf{O}_t 里包含多视角的桌面图像和一句「把蓝色杯子放进右侧收纳盒」;
- \mathbf{A}_t 就是一小段「从当前时刻开始往后」的动作,比如连续 10 步控制:移动手臂、闭合夹爪、抬起、平移、张开夹爪……
论文用的是 条件流匹配(conditional flow matching) 来建模这个分布。关键量包括:
- 把真实动作 chunk \mathbf{A}_t 和一个高斯噪声向量 {\epsilon} \sim \mathcal{N}(0, I) 线性插值: \mathbf{A}_t^{\tau} = (1 - \tau)\mathbf{A}_t + \tau {\epsilon} ,其中 \tau \in [0, 1] 是「噪声时间」。
- 定义目标速度场: \mathbf{u}(\mathbf{A}_t^{\tau} \mid \mathbf{A}_t) = {\epsilon} - \mathbf{A}_t.
训练的时候,通过 flow matching loss 让模型学会从带噪动作 \mathbf{A}_t^{\tau} 、观测 \mathbf{O}_t 预测出这个「去噪方向」。推理时:
- 从纯噪声开始:\mathbf{A}_t^1 \sim \mathcal{N}(0,I) ;
- 把 [0,1] 划成 N 个小步,步长 d\tau = 1/N ;
- 迭代应用一个基于学习得到的速度场 \mathbf{v}_\theta(\mathbf{A}_t^{\tau}, \mathbf{O}_t) 的去噪更新,直到得到 \mathbf{A}_t^0 作为最终动作预测。
直观一点说:
- 把「生成一段动作」这件事,拆成「从纯噪声慢慢往好动作挪」的过程;
- 在每个噪声时间点 \tau ,模型都要学会:在当前观测 \mathbf{O}_t 下,这个带噪动作 \mathbf{A}_t^{\tau} 应该往哪个方向移动,才能更接近真实的 \mathbf{A}_t 。
在桌面整理例子里,可以理解成:
- 一开始,模型「脑子里想象」的动作序列是纯随机乱动的手臂轨迹;
- 经过很多小步迭代,每一步都让它根据桌面图像和指令,去掉一点噪声、加一点有意义的动作模式,最后变成「稳稳抓起蓝色杯子并放入盒子」的那条轨迹。
AdaMoE 在这个框架下做的事情是:不改输入输出形式,也不改 flow matching 目标,只是在内部把负责处理动作 token 的子模块换成了 MoE 版。也就是下面要讲的 MoE-Architecture。
MoE-Architecture:在 π0 的动作专家里插入 MoE
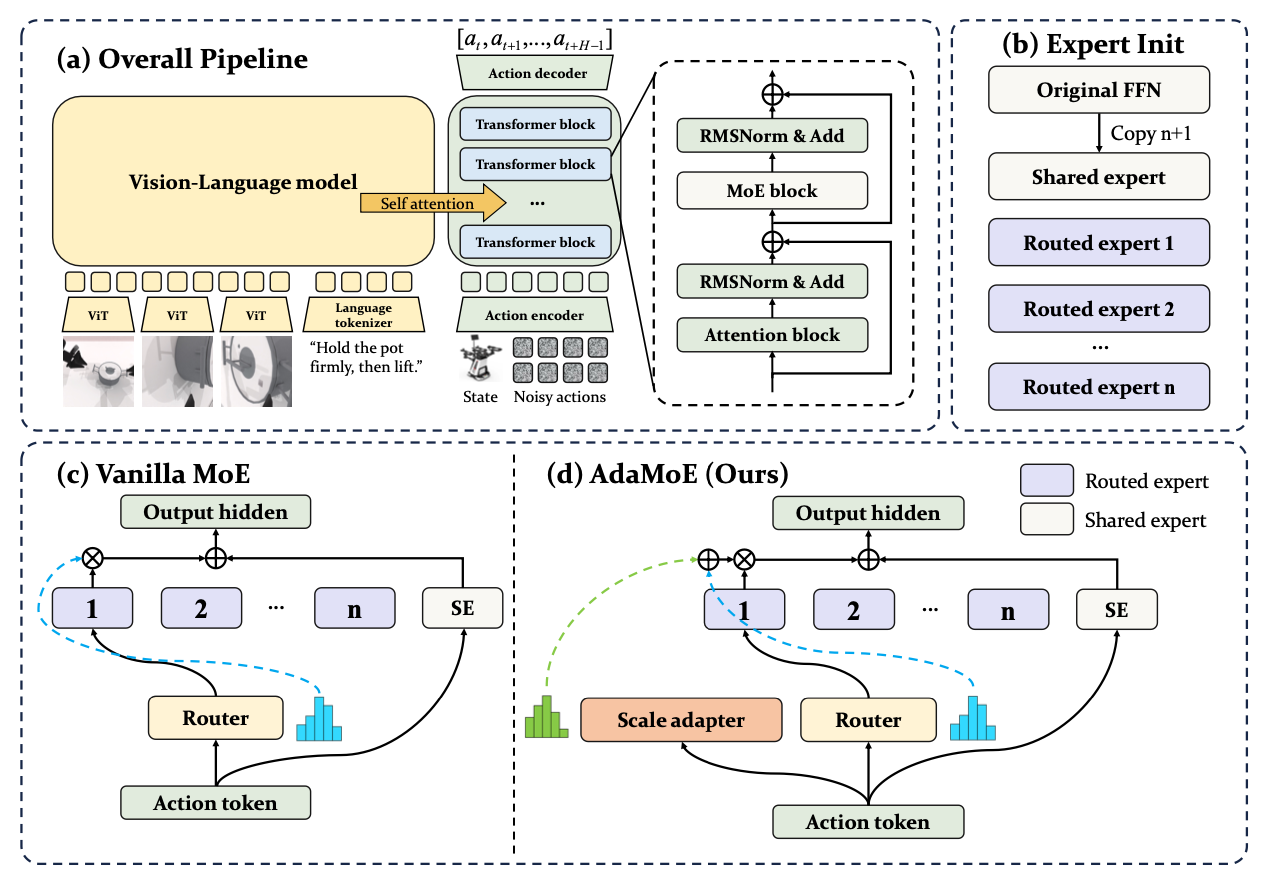
作者是在 π0 的 action expert 模块内部插入 MoE,而不是整个模型都 MoE 化。论文里写得很明确:
Building upon the \pi_0 framework, we introduce a MoE architecture specifically within the \pi_0’s action expert as shown in Figure 1.
这个 MoE 动作专家由两类专家组成:
Shared experts:
- 处理所有任务里都常见的动作模式;
- 捕获「通用的操作知识」,比如常规的移动轨迹平滑、手臂基础协调等;
- 每个动作 token 都会经过 shared experts,始终处于激活状态,用来提供稳定的基础表现。
Routed experts:
- 通过学习到的 gating 机制来选择;
- 更偏向「专攻某类动作或者某类任务」;
- 不同 routed expert 可以专门适应不同类型的操控场景。
对于每个动作 token x_a ,MoE 动作专家的输出由两部分组成:
- 一部分来自 always-on 的 F_{shared}(\cdot) ;
- 一部分来自若干个被选中的路由专家 F_{routed}^{(i)}(\cdot) ,它们通过 gating 给出权重 w_i(x_a) 之后再被融合。
论文里提到的 gating 机制:
- gating 网络记作 G(\cdot) ;
- 对每个动作 token,它先对所有 routed experts 打分;
- 然后用 top-k selection 选出得分最高的 k 个专家,只激活这 k 个;
- 这样可以在保持表达能力的同时,维持计算成本不随专家数线性上涨。
在桌面整理的例子里,可以这样理解:
- shared experts:负责「基础动作风格」,比如通用的移动顺滑、不撞桌沿;
- routed experts:
- 专家 1:专精「抓起桌面上的物体」;
- 专家 2:专精「把物体放进盒子」;
- 专家 3:专精「避开桌面上其它物体」……
当机器人正在执行「把蓝色杯子从桌面抬起」这段 token 时:
- gating 可能主要激活「抓起」相关的几个专家,再加上 shared experts;
- 到了「把杯子放进盒子」这段 token 时,又会更偏向激活「放置」相关专家;
- 这就是 MoE 在动作空间里的「按需选专家」。
负载均衡:防止专家崩塌(expert collapse)
引入 MoE 后一个经典问题是:如果 router 一直偏爱某几个专家,其他专家就几乎不被用到,模型等于白扩容了。
为此,AdaMoE 在 routed experts 上加入了一个负载均衡损失(load balancing loss),目标是:
- 在 top-k 路由机制下,让每个专家被选中的频率尽量均衡;
- 同时,让 gating 概率本身也不要长期倾向某几个专家。
论文中对两个核心统计量做了明确定义:
- 对于第 i 个专家,被选中频率:
这里 N 是 token 总数,f_i 表示「在所有 token 中,第 i 个专家出现在 top-k 里的比例」。
- 对应的平均 gating 概率:
其中 g_j^{(i)} 是第 j 个 token 对第 i 个专家的 router logit,\text{softmax}(g_j^{(i)}) 是在 softmax 之后对应的 gating 概率。
论文中引入了一个带超参数 \alpha 的负载均衡损失 \mathcal{L}_{balance} ,通过 f_i 和 p_i 来约束专家的使用频率和 gating 概率,使它们更加均衡。\alpha 控制这个均衡约束的强度。
直观理解:
- f_i 看「被选中次数」;
- p_i 看「被分配的概率质量」;
- 负载均衡损失会惩罚「有的专家几乎从不被选、或者几乎不拿到概率权重」的情况(比如,如果某个专家在一大批 token 上几乎从不出现在 top‑k 中,那它对应的 f_i 会非常小;
又或者 softmax 后的大部分概率质量长期集中在少数几个专家上,其它专家的 p_i 接近 0,这两种不均衡都会让 \mathcal{L}_{\text{balance}} 变大,因为这个 loss 本质上是在度量 \{f_i\}, \{p_i\} 和均匀分布 1/K 的偏离程度——谁被用得特别多或者特别少,都会把这组数往「不均匀」方向拉,偏离越大,loss 就越大。在反向传播时就会给 router 施压,让它在之后的路由中「多分一点 token 和概率」给这些冷门专家)。
在桌面整理的例子里:
- 如果 router 总是用「抓杯子」专家和「放置」专家,但基本不用「避障」专家;
- 那么 f_{\text{避障}} 和 p_{\text{避障}} 都会很小;
- 负载均衡损失会推动 router 偶尔也多用一点「避障」专家,给它机会学习属于自己那一类模式,这样将来在更复杂桌面布局上就更有用。
总的训练目标,是把原来的 flow matching loss 和这个负载均衡 loss 加在一起:
- flow matching 部分仍然主导「动作生成要贴近真实轨迹」;
- 负载均衡部分则防止专家崩塌,让所有 routed experts 都有机会逐渐学到自己擅长的子任务。
Decoupled Expert Selection and Weighting:解耦「选谁」和「权重大」
上面说的是一个「常规的 MoE 动作专家 + 负载均衡」故事。但作者发现,一个更深层的问题在于 传统 MoE 的路由机制把「选择哪个专家」和「这个专家权重多大」绑在了一起。
传统 MoE 的耦合设计
在传统 MoE 里,大致流程是:
- router 先对每个专家算一个 logit r_i(x);
- 对所有 r_i(x) 做 softmax,得到专家概率;
- 用 top-k 选出概率最高的 k 个专家;
最后,用这同一组 softmax 概率作为加权系数,把这些专家的输出加权求和。
论文指出的问题是:
- 负载均衡损失 \mathcal{L}_{balance} 希望 softmax 出来的概率「看上去比较平均」,这样专家用得更均匀;
- 但任务损失 \mathcal{L}_\tau(这里是 flow matching 相关的主任务 loss)又希望有比较「偏心」的分布,比如在某些操作场景中,少数几个动作专家特别重要;
- 这两个目标都是通过同一组 router logits r_i(x) 来优化的,于是:
- 同样一组 logits,要既负责让专家出场频率平均;
- 又要在任务需要的时候,大幅偏向某个专家;
- 结果就是 router 不得不在两边「折中」,不能很好地满足任何一边。
换回桌面整理的例子:
- 对于「抓起杯子」这个场景,任务损失其实希望「抓握专家」权重大一些;
- 可是负载均衡又希望所有专家长期看起来都差不多常用;
- 如果选择和权重都来自同一个 softmax,router 就会卡在中间:抓握专家既不能太突出(否则不平衡),又不能太弱(否则抓不好)。
AdaMoE 的解法:加一个 scale adapter
论文给的思路是很直接的:
把「选谁上场」和「上场之后贡献多少」这两件事拆开做。
具体做法是:
- 在原有 router R(\cdot) 的基础上,引入一个新的 scale adapterS(\cdot) ;
- 这两个模块在结构上是一样的,但承担的角色不一样:
- router R(\cdot):决定 哪些专家被选中,主要负责多样性和负载均衡;
- scale adapter S(\cdot):在专家已经被选中的前提下,调节它们在最终输出里的贡献大小,主要服务任务性能。
论文中写道:
? Our scale adapter S(\cdot) shares the identical architecture as the original router R(\cdot) but serves a distinct purpose: while the router determines which experts to select, the scale adapter additively adjusts how much each selected expert should contribute to the final output.
形式上,对于输入 x,
- router 会产生 logits R_i(x) 并通过 top-k 决定被选中的专家集合;
- scale adapter 会产生对应的 logits S_i(x) ;
- 对于被选中的专家,第 i 个专家的最终权重系数,来自 router 与 scale adapter 的 加和:
(论文里是描述性表述:the final weighting coefficient for each selected expert is the sum of its scale adapter contribution and its router contribution。)
这样一来,优化目标就被「分流」了:
router R(\cdot) 这条路更多对齐负载均衡:
- 让不同专家在不同场景下被选中的机会更均匀;
- 满足 \mathcal{L}_{balance} 对 f_i、p_i 的约束;
scale adapter S(\cdot) 则主要对齐任务损失:
- 在已经选中的专家集合里,根据当前具体操作场景,自由地拉高或拉低各个专家的贡献;
- 不再直接被负载均衡强行「拽回去」。
我们回到到桌面整理的例子:
router 决定:
- 「抓起杯子」动作阶段:选中「抓握专家 + 基础移动专家 + 轻微避障专家」这几个;
- 「把杯子放进盒子」阶段:选中「放置专家 + 基础移动专家 + 更强避障专家」这几个;
scale adapter 再根据当前 token 的具体状态:
- 对「抓起」阶段,把抓握专家的权重往上拉,避障专家权重可以相对小一点;
- 对「放入盒子」阶段,把放置专家和避障专家的权重拉高,抓握专家权重下降。
关键是:
- 谁被选中(由 router 决定)可以保持相对多样、平均使用,满足负载均衡,不轻易「一刀切」某些专家;
- 谁更重要(由 scale adapter 决定)则可以更大胆地「偏心」,只要对任务 loss 有好处就行,不被负载均衡直接限制。
简单来讲就是:某个专家「被选中上场」并不意味着它就该「唱主角」;它可以在场,但只在恰当的时刻、用恰当的强度出力。
实验
简单带一下论文里给的结果数量级:
- 在 LIBERO 任务上,相比 π0 基线有 1.8% 的提升;
- 在 19 个 RoboTwin「hard setting」任务上,成功率提升 9.3%;
- 在真实机器人实验中,有 21.5% 的提升。
这些数字的重点不是「涨了多少」,而是:在不推高推理计算量(top-k 稀疏激活)的前提下,通过在 action expert 里做 MoE + 解耦路由,确实能在模拟和真实场景里都带来比较稳定的收益。
对应到桌面整理机器人,可以理解为:在各种「收杯子」「避开桌面杂物」「放进不同位置的盒子」任务中,AdaMoE 让机器人更容易学到适合「抓起」「放下」「避障」等不同子技能的专家,并在推理时按需组合使用这些专家,而不是总指望一个「万能专家」。
总结
从论文本身来看,AdaMoE 做的事情比较「外科手术式」:
1、不重新设计整个 VLA,只是在 π0 的 action expert 上做 MoE 化;
2、MoE 部分也不是花样很多的 tricks,而是抓住了一个挺本质的点:
- 在机器人这类任务里,负载均衡和专家专门化确实是硬需求;
- 传统「选择 + 权重二合一」的路由机制,会让这两个目标直接在同一组 logits 上打架;
- 解耦之后,再用 scale adapter 专门调节贡献强度,会让设计更自然。
3、从「怎么用在别的 VLA 上」的角度看,这篇工作给的启发大概有几点:
- 如果已经有一个不错的 VLA 基座模型(比如 π0 一类),可以考虑优先在 action expert 这种「直接关乎控制质量」的子模块里做 MoE 扩展;不一定要全模型都 MoE 化。
- 做 MoE 时,一定要认真想清楚 router 在任务里的角色:它既是「调度专家资源」的中枢,又会直接影响专家到底学到什么样的模式;把「让谁上场」和「谁更重要」分开,往往有助于理清这些目标。
- 在机器人这样对稳定性和泛化都很敏感的场景下,单纯追求参数规模并不一定带来线性收益;像 AdaMoE 这样「架构上让专家更好协作」的设计,往往更划算。
4、如果之后打算在别的 VLA 架构上做 MoE 类似的改造,这篇论文的套路可以作为一个相对干净、可复用的模板:
- 保留原有的条件流匹配或其它动作建模方式;
- 把动作相关的核心子网络拆成 shared + routed experts;
- 用 top-k 稀疏路由 + 负载均衡 loss 防止专家崩塌;
- 再额外加一个 scale adapter,把专家选择和权重从优化目标层面「解绑」。